
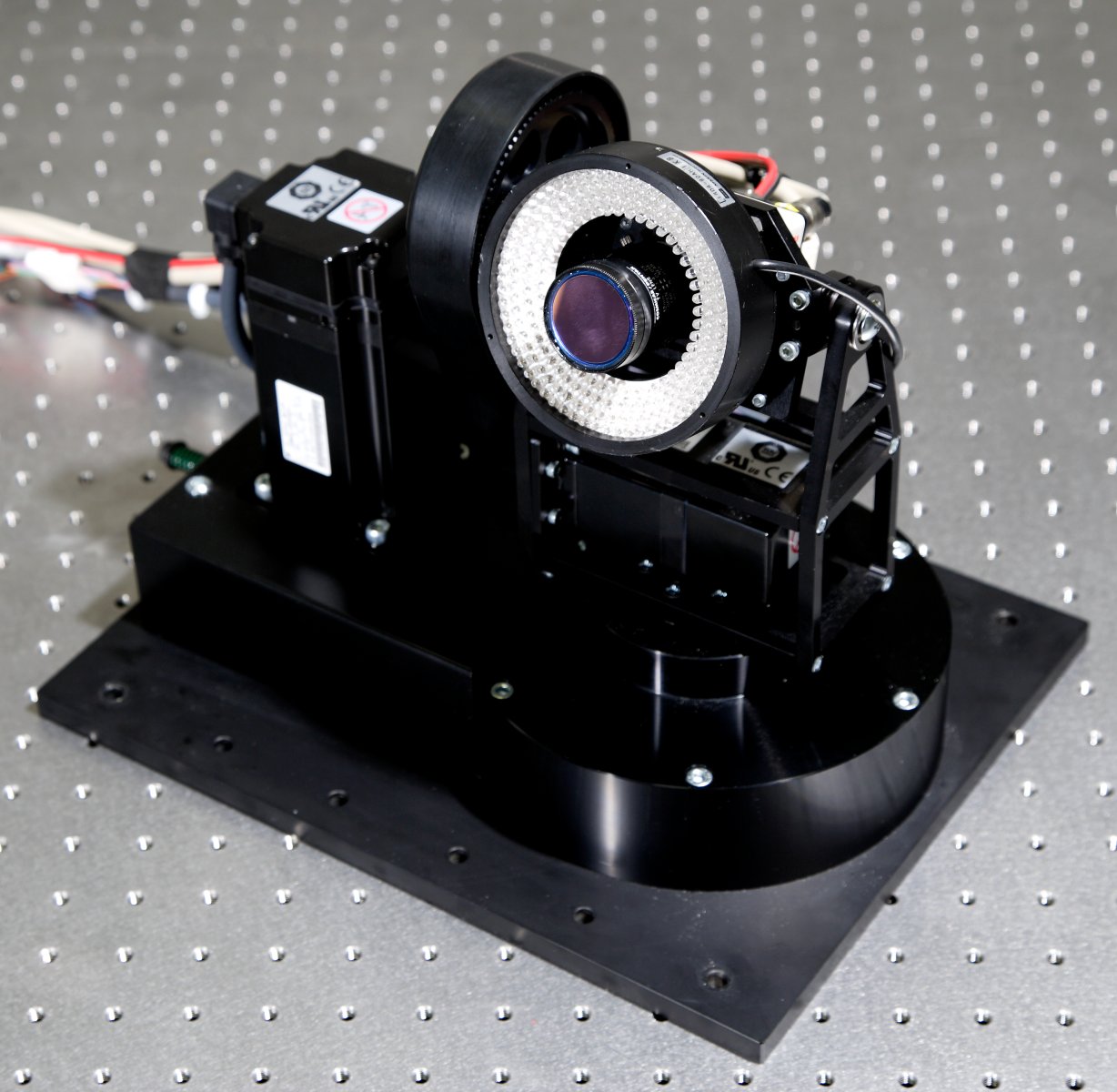
Development of kHz-level high-speed visual processing systems and high-speed visual recognition algorithms. Realization of high-speed recognition capability that surpasses that of humans.
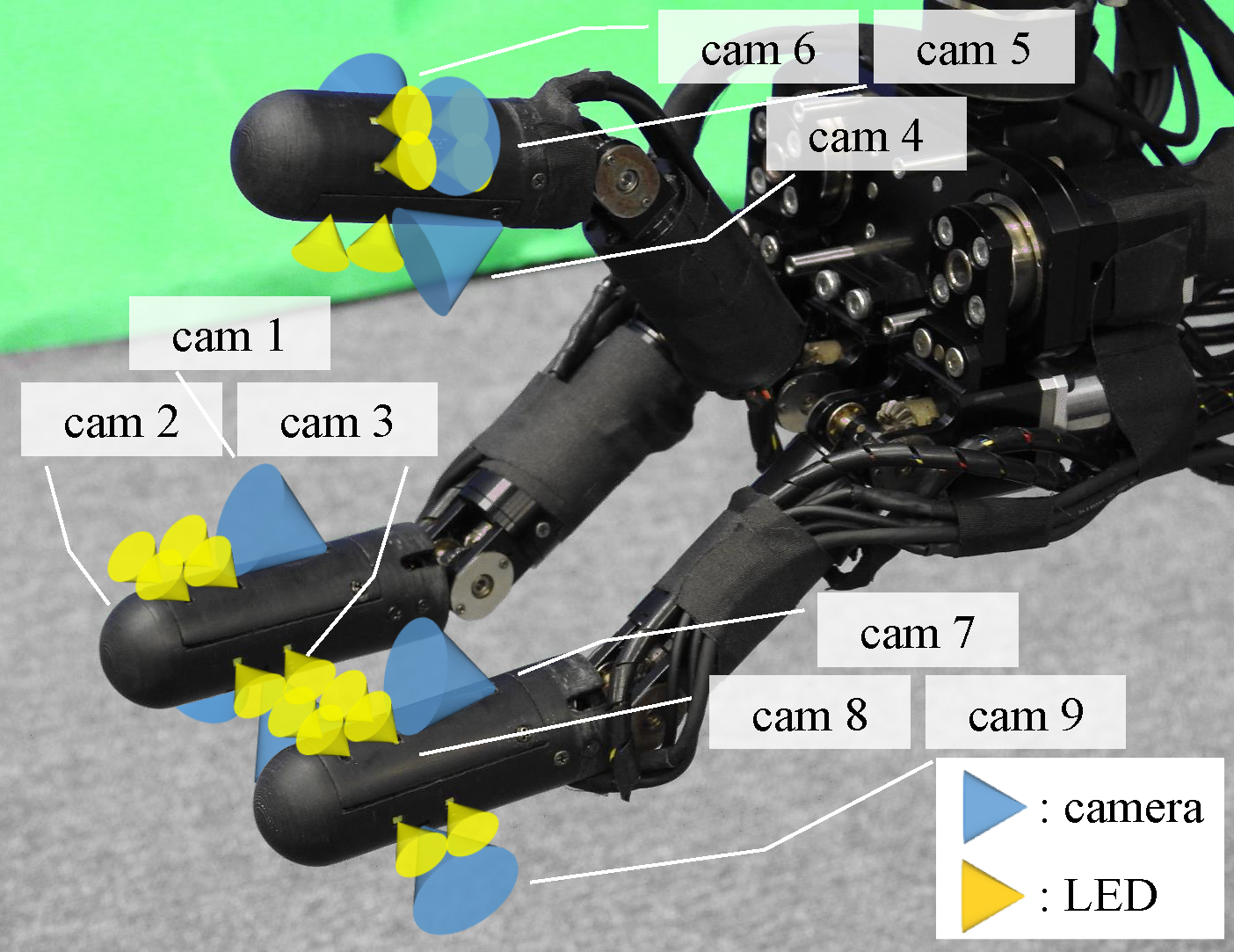
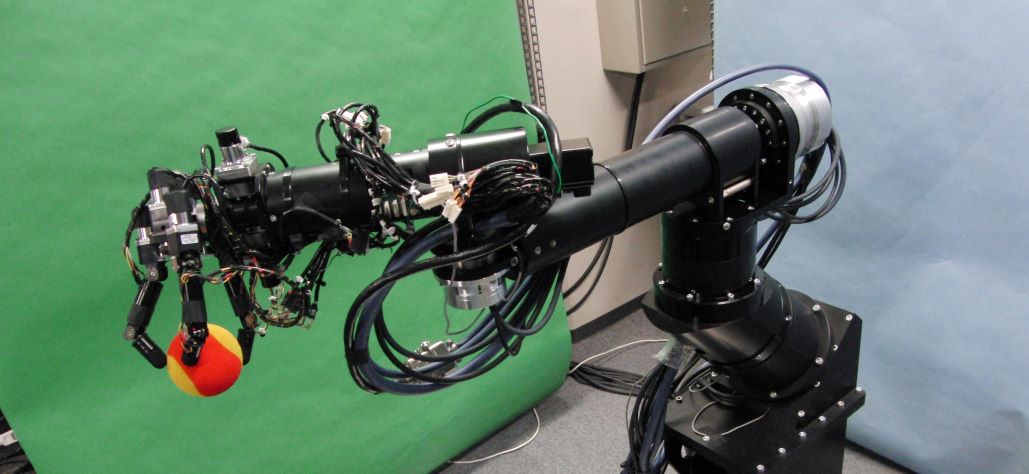
A robotic system with numerous cameras mounted on the robot's body surface. The aim of this system is to realize high-speed manipulation capability by eliminating blind spots and real-time 3D recognition of the surrounding environment.

By using high-speed visual feedback and motion generation that takes into account the dynamics of the robot, we aim to achieve high-speed and dexterous maneuverability that surpasses that of humans.

Based on real-time 3D visual recognition, the system aims at the ability to dexterously manipulate flexible objects such as cloth, paper, and string.

The goal is to develop a robot system that can beat humans by considering the athletic ability and psychological state of the opponent and generating optimal motions.

Development of an assisted operation system that integrates operation control and autonomous slave control with visual feedback

Controlling Drones with High-Speed Visual Feedback
Chiba University, Faculty of Engineering, Department of Mechanical Engineering
Chiba University, Graduate School of Engineering / Graduate School of Science and Engineering, Department of Fundamental Engineering, Mechanical Engineering Course
Address: 1-33 Yayoi-cho, Inage-ku, Chiba-shi, Chiba 263-8522
Faculty Room: 601, 6th floor, Natural Science and Technology Building 2
Tel: 043-290-3194
Laboratory: Natural Science Research Building 2, 6F 611
Tel: 043-290-3196
![]()
![]()