スポーツやボードゲームなどの競技ゲームは,人工知能やロボット技術の例題として有効性が高く,これまでにも数多くの研究が行われてきた。本研究課題では,エアホッケーなどに代表される対人型物理的インタラクションゲームを対象とする。これには次のような特徴がある。
- 人を相手にするために,単純な動作だけでなく戦略的な駆け引き,相手の動静の推定など,高度な知能技術の課題を含むこと。
- 物理的なインタラクションを含むので,感覚や運動を含むシステム統合での知能技術の検証ができること。
- 個人ゲームは,集団ゲームと比較して協調問題やコミュニケーションの問題の占める割合が少なく,問題を単純化して個人の内部の知能技術に集中できること。
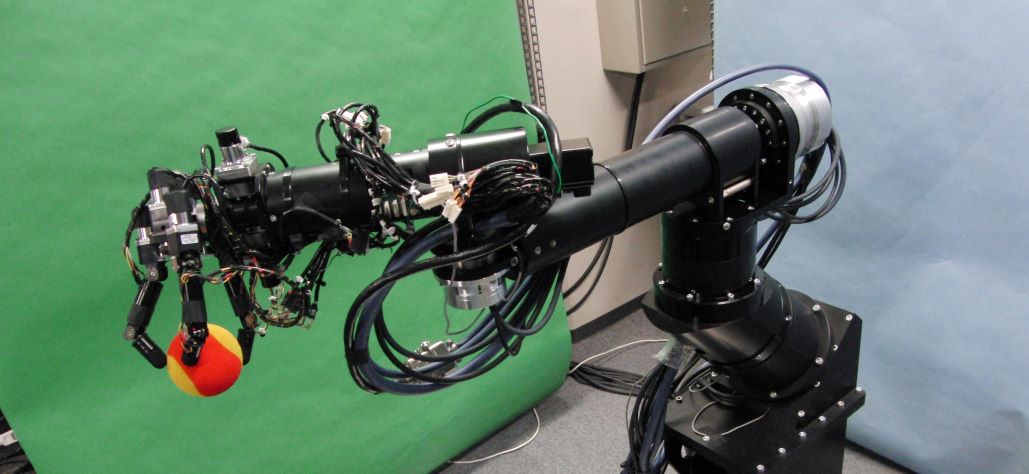
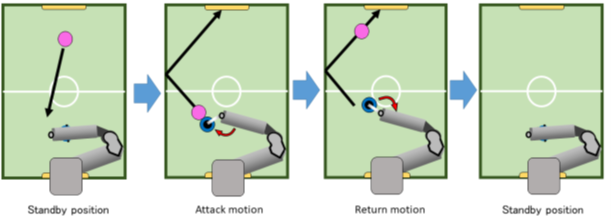
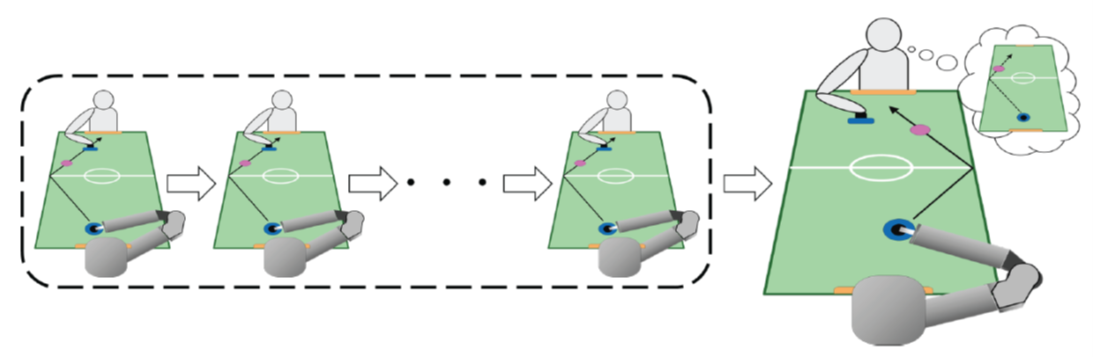
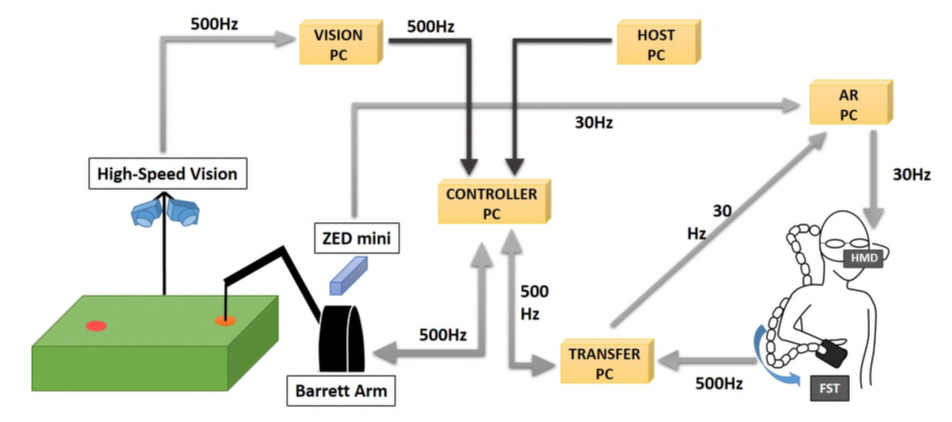
本研究室では,これまでに対人型物理的インタラクションゲームの一例として高速ビジョンとマニピュレータを用いた高速エアホッケーロボットを中心に研究を行ってきた。マニピュレータの能力は人間の腕と比較して劣っているが,1秒間に500Hz以上で認識する高速ビジョンを導入して認識能力を向上させることで,人間と遜色ない対戦能力を実現できる。また,対戦相手の隙を狙って打撃するための最適打撃動作,数手先の状況まで予測して最適化する動作戦略[といった戦略的な要素の研究を行っている。エアホッケーゲームは単純な打ち合いだけでなく,対戦相手の状態に合わせて,弱点をつく,フェイントをかけるなどの,物理的かつ心理的な要素を含む高度なゲームであり,リアルタイムでの予測と意志決定の問題解決が性能向上のカギとなる。本研究では,ロボット工学,制御理論,最適化理論,深層学習,強化学習,機械学習の技術を応用し,人間を超える新たな対戦ロボットシステムの設計理論を構築することを目的とする。