Ziran Li, Hao Wu, Qi Wang, Wei Wang, Satoshi Suzuki, Akio Namiki, Small UAV Urban Overhead Transmission Line Autonomous Correction Inspection System Based on Radar and RGB Camera, IEEE Sensors Journal, Volume: 24, Issue: 5, pp.5593-5608, 2024.
Z. Li, Q. Wang, T. Zhang, C. Ju, S. Suzuki and A. Namiki, "UAV High-Voltage Power Transmission Line Autonomous Correction Inspection System Based on Object Detection," in IEEE Sensors Journal, vol. 23, no. 9, pp. 10215-10230, 1 May1, 2023, doi: 10.1109/JSEN.2023.3260360.
web
Li, Ziran, Yanwen Zhang, Hao Wu, Satoshi Suzuki, Akio Namiki, and Wei Wang. 2023. "Design and Application of a UAV Autonomous Inspection System for High-Voltage Power Transmission Lines" Remote Sensing 15, no. 3: 865.
web
Ziran Li, Akio Namiki, Satoshi Suzuki, Qi Wang, Tianyi Zhang, and Wei Wang. 2022. "Application of Low-Altitude UAV Remote Sensing Image Object Detection Based on Improved YOLOv5" Applied Sciences 12, no. 16: 8314.
web
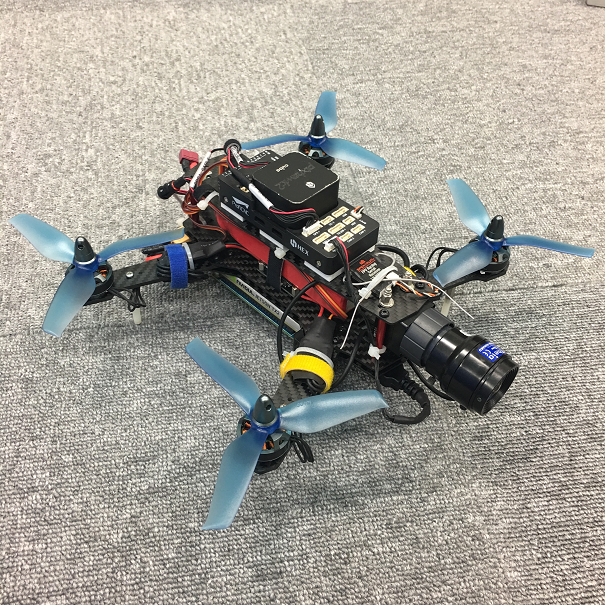
マルチカメラドローンによる実時間視覚フィードバック制御
Dongqing He, Hsiu-Min Chuang, Jinyu Chen, Jinwei Li, and Akio Namiki , Real-Time Visual Feedback Control of Multi-Camera UAV , Journal of Robotics and Mechatronics , Vol.33 No.2, pp. 263-273, 2021 web