CPDによる紙の形状推定
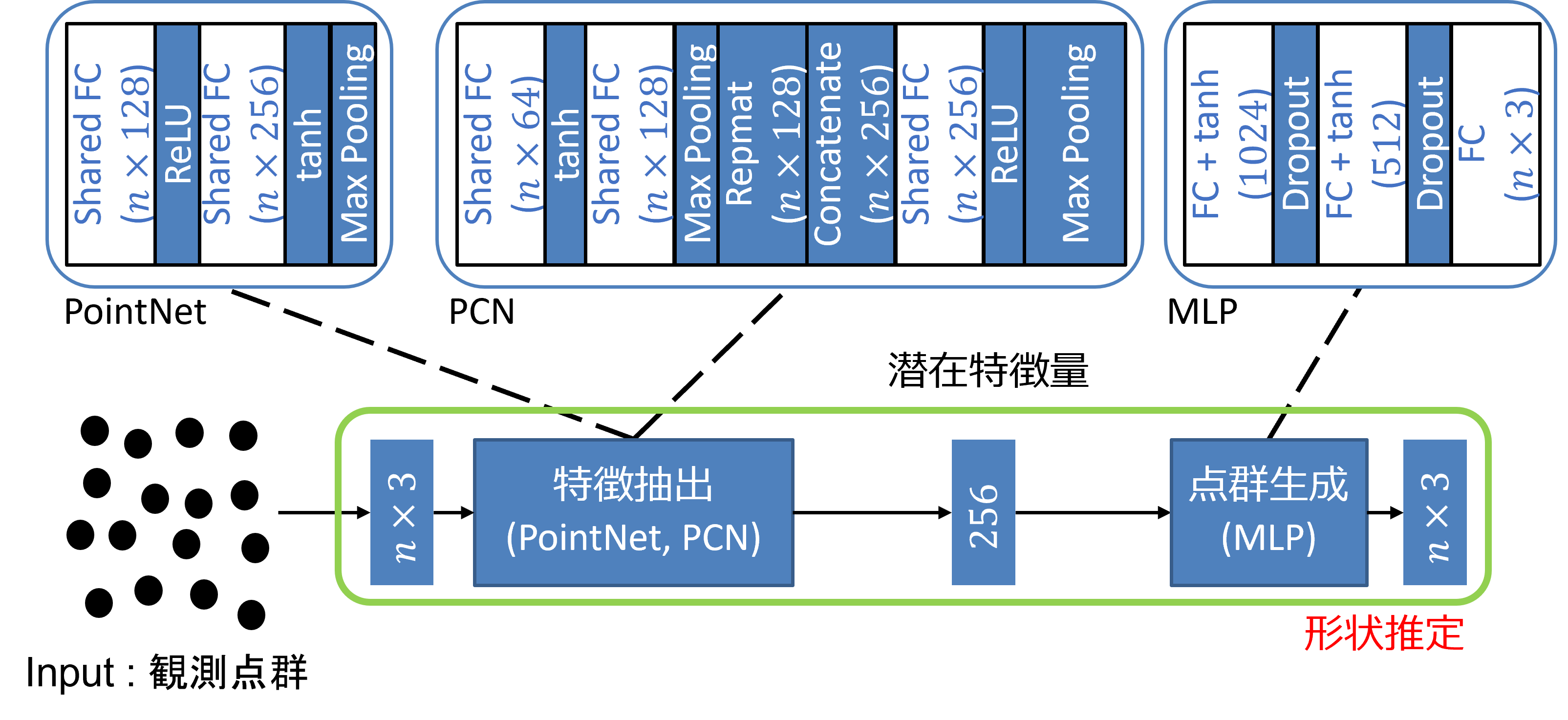
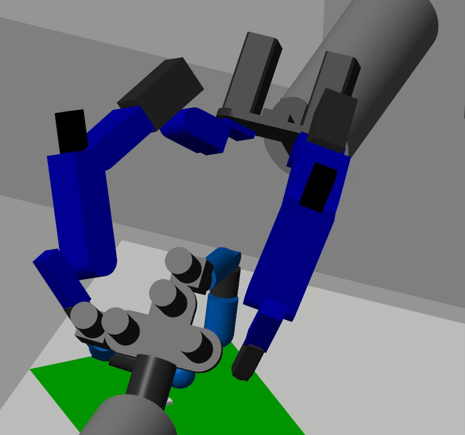
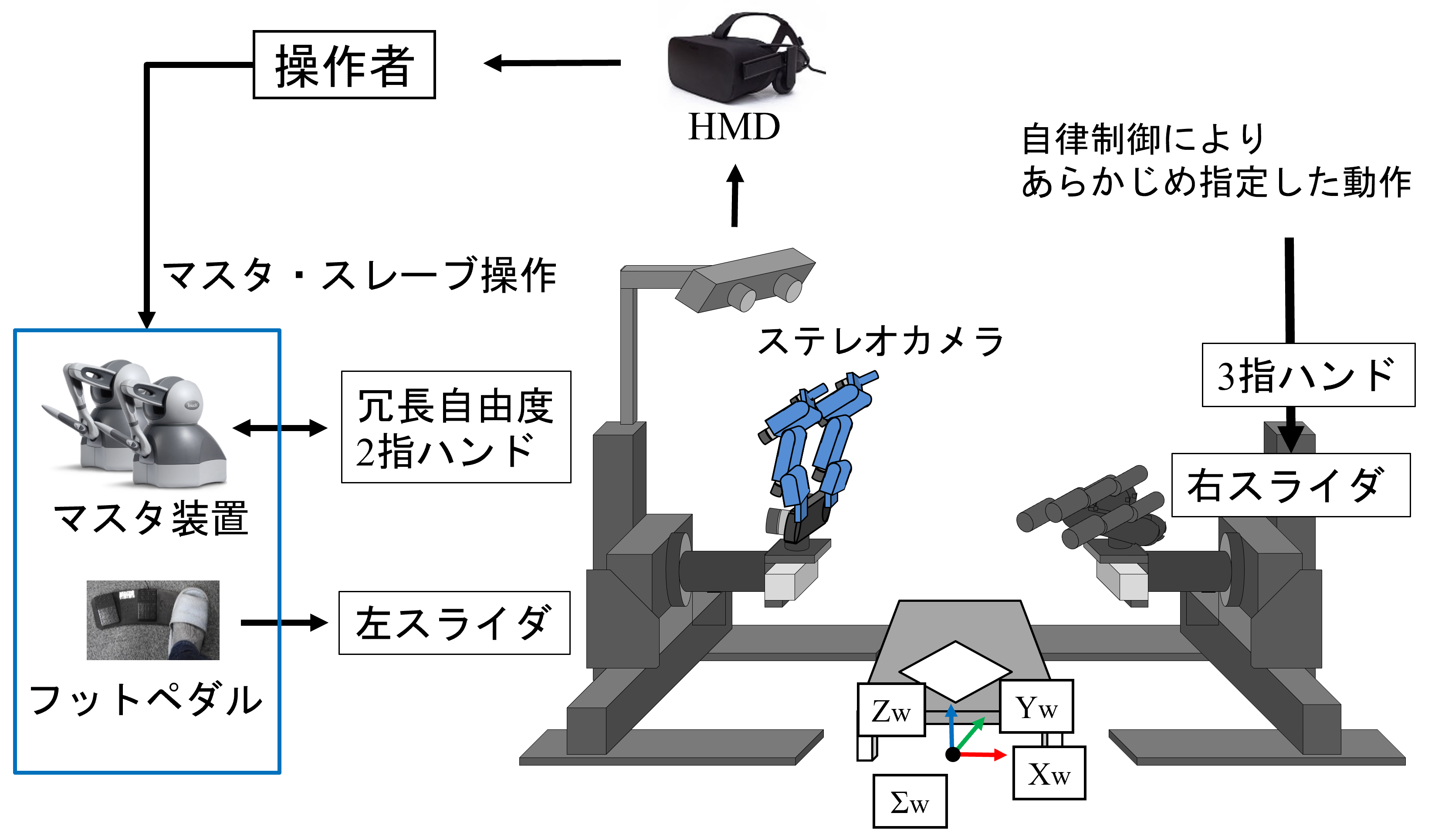
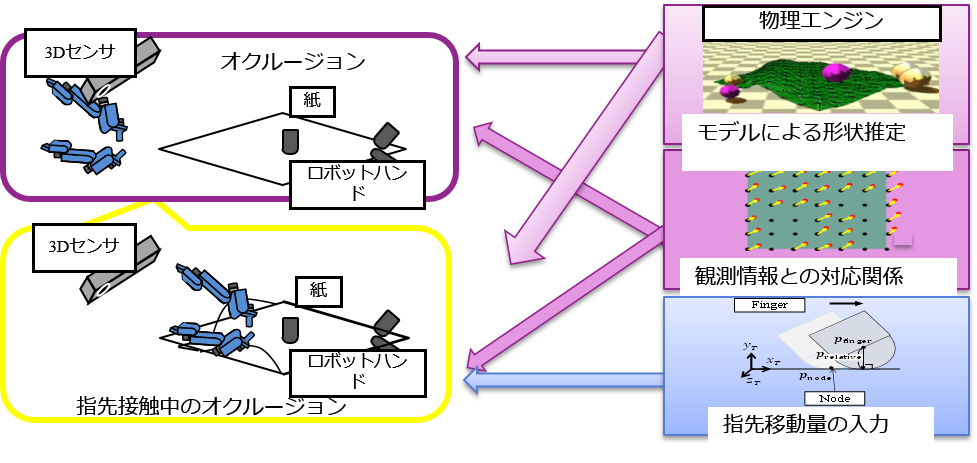
近年、剛体物体を操作できるロボットは数多く存在するが、紙のような変形可能な物体を操作することは難しい。このようなロボットが変形物体を操作するためには、紙の形状をリアルタイムに計測することが重要である。我々の研究グループの先行研究では、視覚情報で観測された点群と物理モデルとのマッチングによって紙の形状を推定していた。しかし、折れ線による紙の剛性の変化やロボット自身によるオクルージョンによってマッチング誤差が生じるという問題があった。本論文では、物理モデル上の折れ線近傍のリンクの自然長を変化させることで、紙の剛性の変化を表現する。CPD(Coherent Point Drift)を用いて物理モデルと点群をマッチングさせることにより、剛性の変化やオクルージョンに対してロバストに紙の形状を推定することができる。ロボットによる二つ折り動作における紙の形状の推定実験により、提案手法の有効性を示す。
- 中村 亮裕, 山本 開, 並木 明夫, 折り紙ロボットのための紙の形状認識システムの開発, 日本機械学会年次大会2021
- 中村 亮裕,寺田 直人,並木 明夫, 折り目を考慮した紙と物理モデルの形状マッチング, SI2020(第21回計測自動制御学会システムインテグレーション部門講演会), 2B2-13, 2020