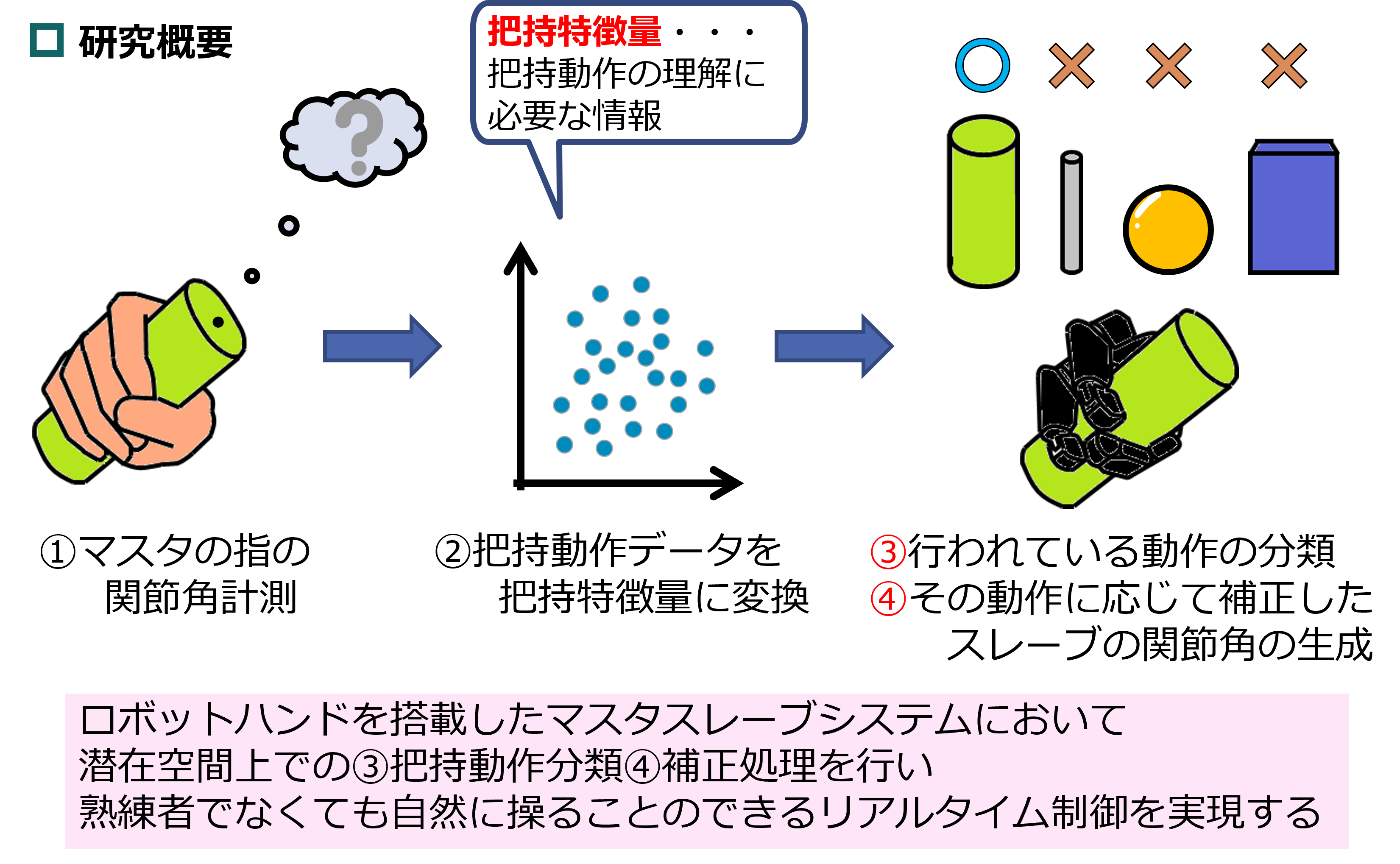
Chuanyu GUO, Yang LIU, Ayaka MATSUZAKA, Takuya SHIRATO, Tetsuya Mouri, and Akio NAMIKI, Mapping Grasping Motion of Hand between Master and Slave in A Low-dimensional Latent Space, 2018 IEEE Conference on Robotics and Biomimetics, pp.1941-1946, 2018
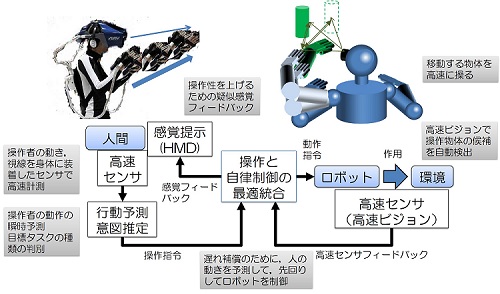
A. Namiki, Y. Matsumoto, Y. Liu, T. Maruyama, Vision-Based Predictive Assist Control on Master-Slave Systems, IEEE Int. Conf. on Robotics and Automation, pp.5357-5362, 2017
 >
>