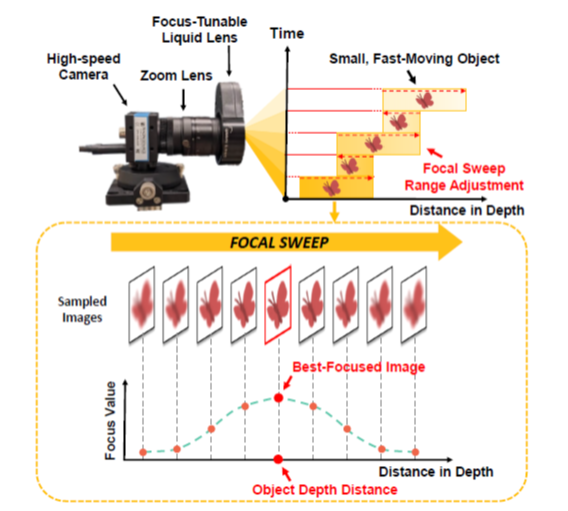
Zhang T, Shimasaki K, Ishii I, Namiki A. High-Magnification Object Tracking with Ultra-Fast View Adjustment and Continuous Autofocus Based on Dynamic-Range Focal Sweep. Sensors. 2024; 24(12):4019. web
Tianyi Zhang, Kohei Shimasaki, Idaku Ishii, Akio Namiki, Dynamic-Range Focal Sweep: Seamless Continuous Autofocus Based on High-Speed Vision for Magnified Object Tracking, 2024 IEEE/RSJ Int. Conf. on Intelligent Robot and Systems (IROS), 2024
Tianyi Zhang, Kohei Shimasaki, Idaku Ishii, Akio Namiki, Adaptive Short-Range Focal Sweep: Continuous Autofocus for Magnified Object Tracking Based on High-Speed Vision, 2024 IEEE Int. Conf. on Robotics and Automation (ICRA), 2024.
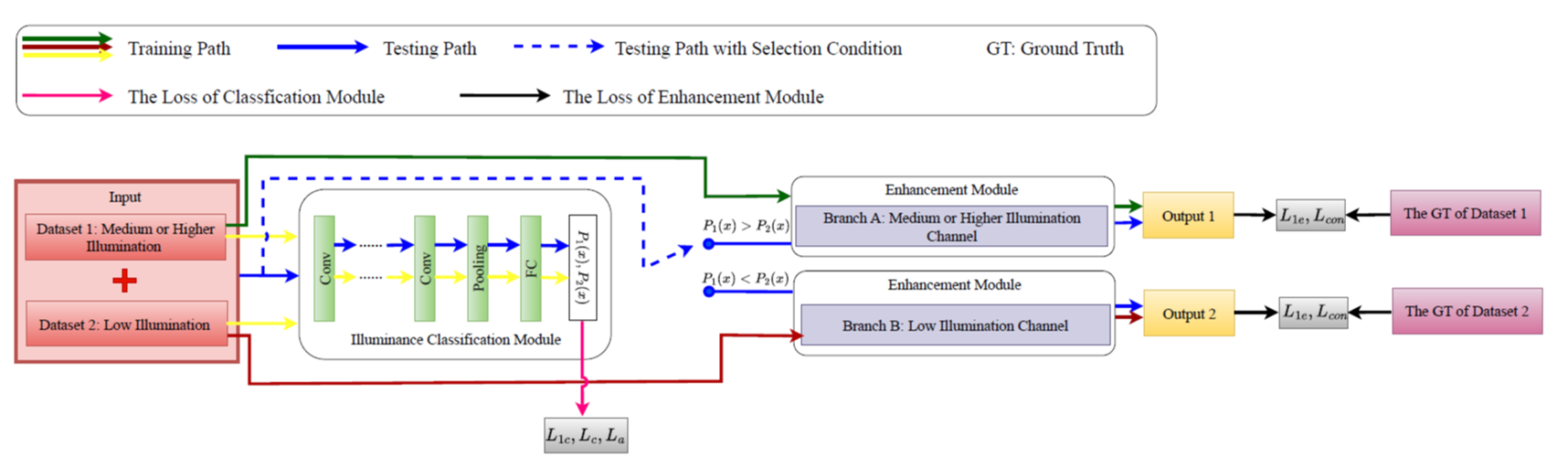
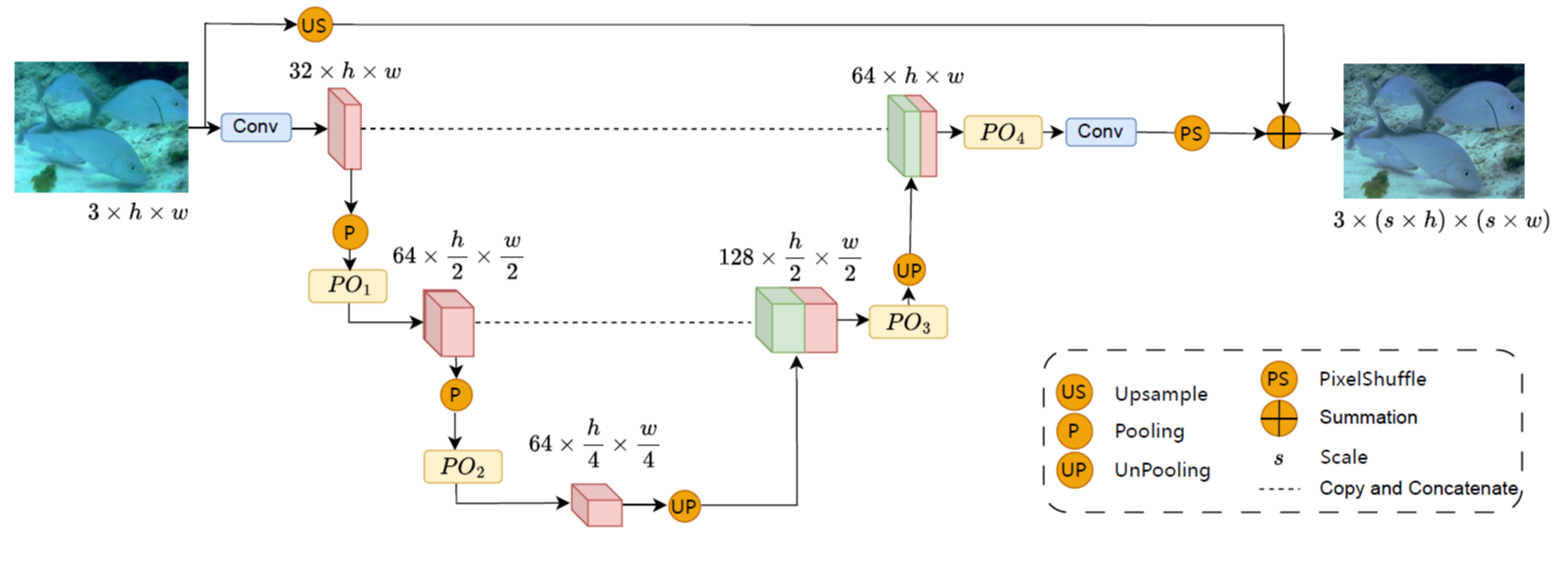
Yanwen Zhang, Ziran Li, and Akio Namiki, Redundant Feature-processing Module Based on Dual-branch for Underwater Image Enhancement, IEEE Transactions on Instrumentation and Measurement, 2024, web