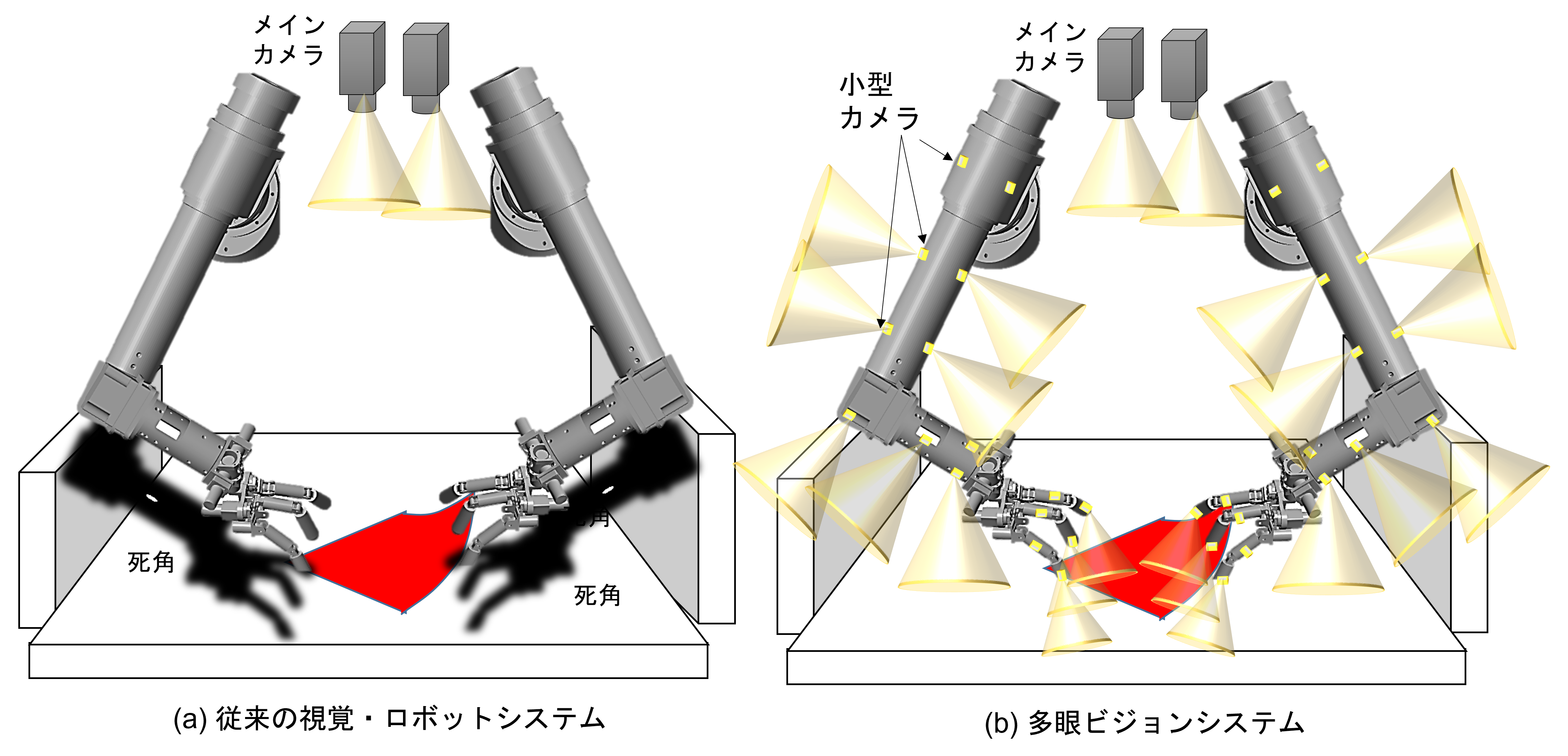
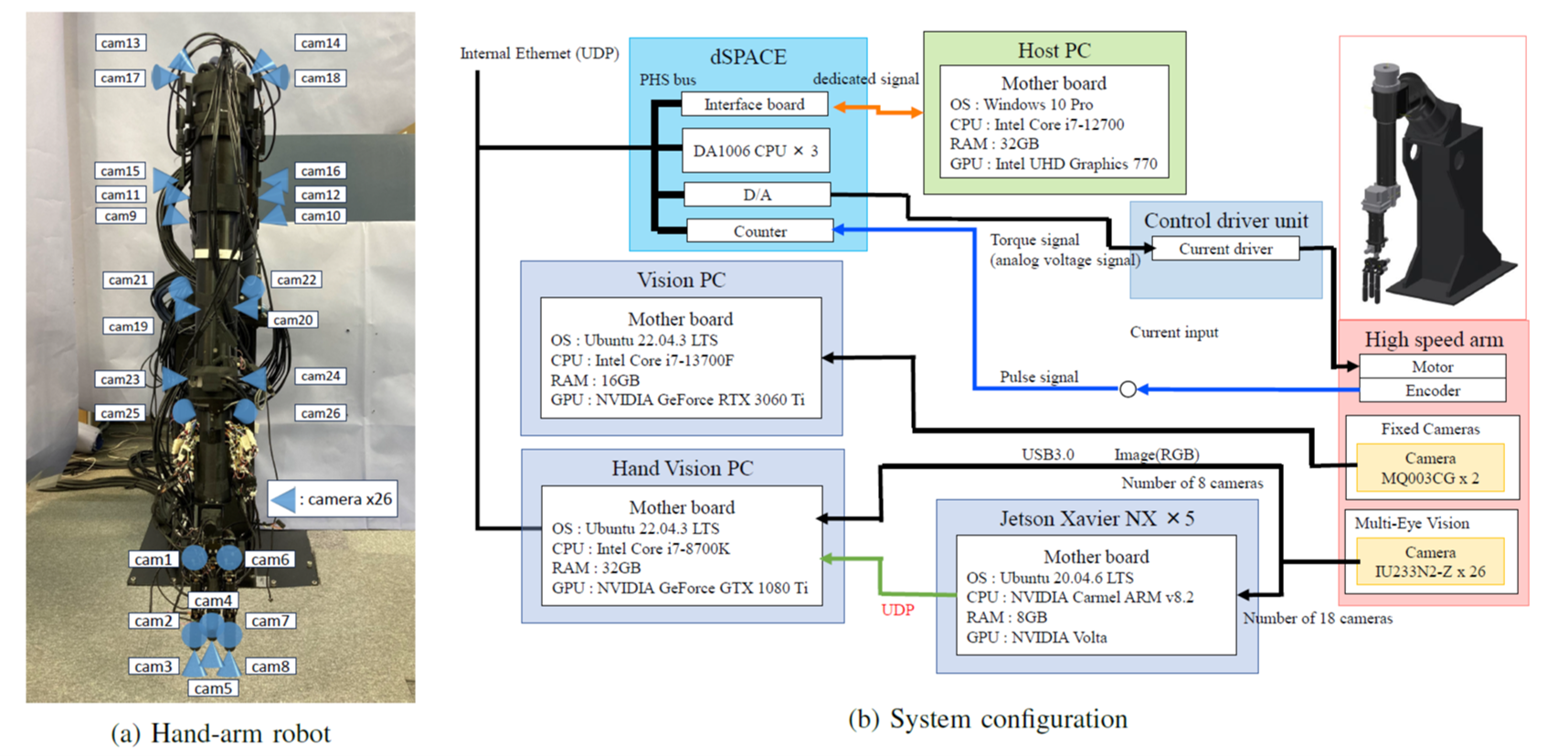
近年,未知環境において作業する知能ロボットの開発が進んでいるが,作業速度については人間に比較すると非常に遅い。これは視覚認識が不十分であるためである。図1-1(a)は双腕作業の例であるが、上部のカメラだけでは,ロボットの身体によって覆い隠されてしまう自己オクルージョンが発生する。これを回避するためには、カメラの位置を移動するか、ロボットをいったん視野外に避ける必要があるが、作業速度が大幅に遅れてしまう。
人間には皮膚や関節の柔らかさがあるので衝突の衝撃を吸収できるが、金属部品が多くて重く、機械的コンプライアンスが低いロボットでは衝突の危険性が格段に大きい。近年,ソフトロボットの研究が進んではいるが,高速高精度ロボットでは重量と剛性はいまだに大きい。以上より、高速作業では、接触する前に周辺の環境認識をいかに行うかがカギとなる。
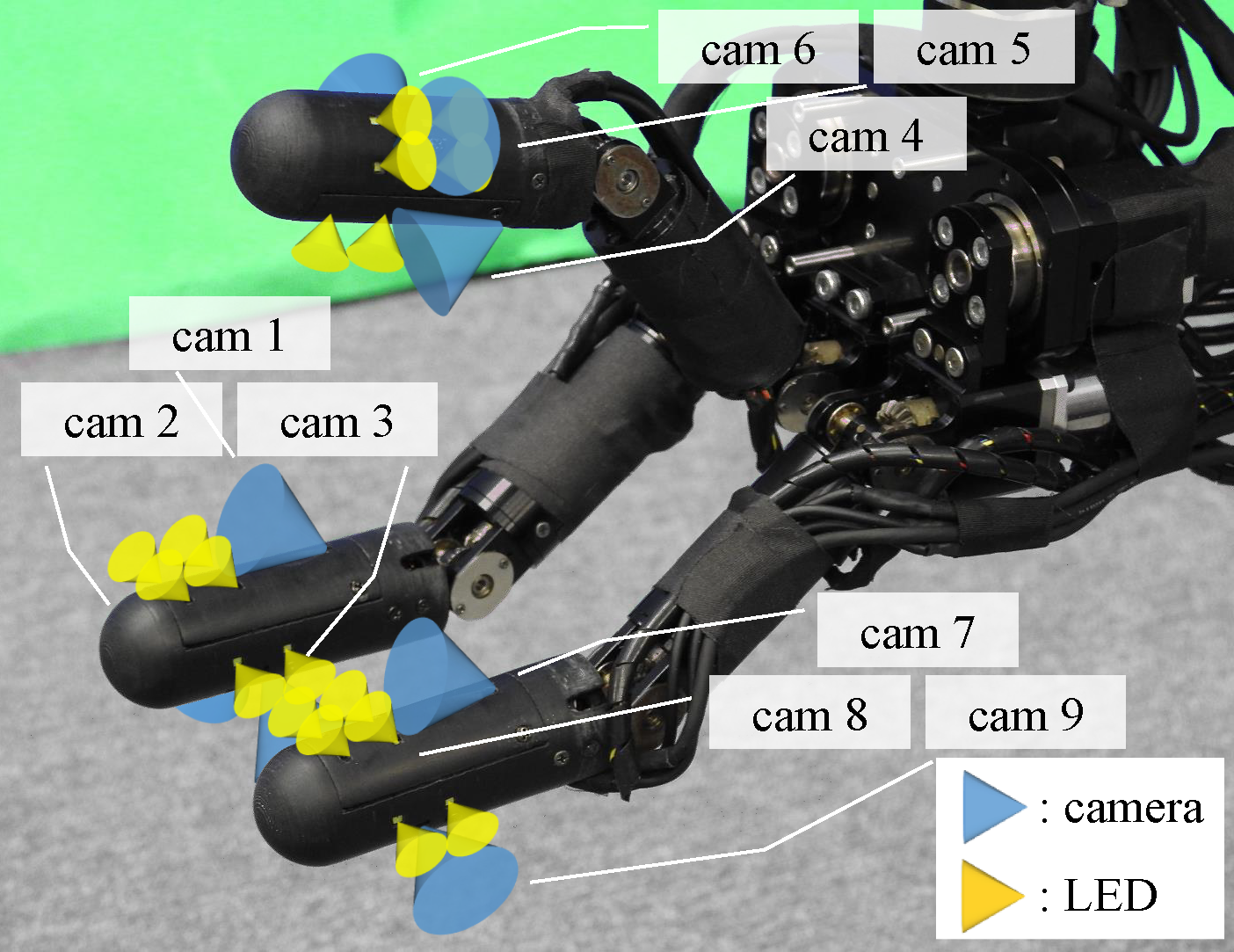
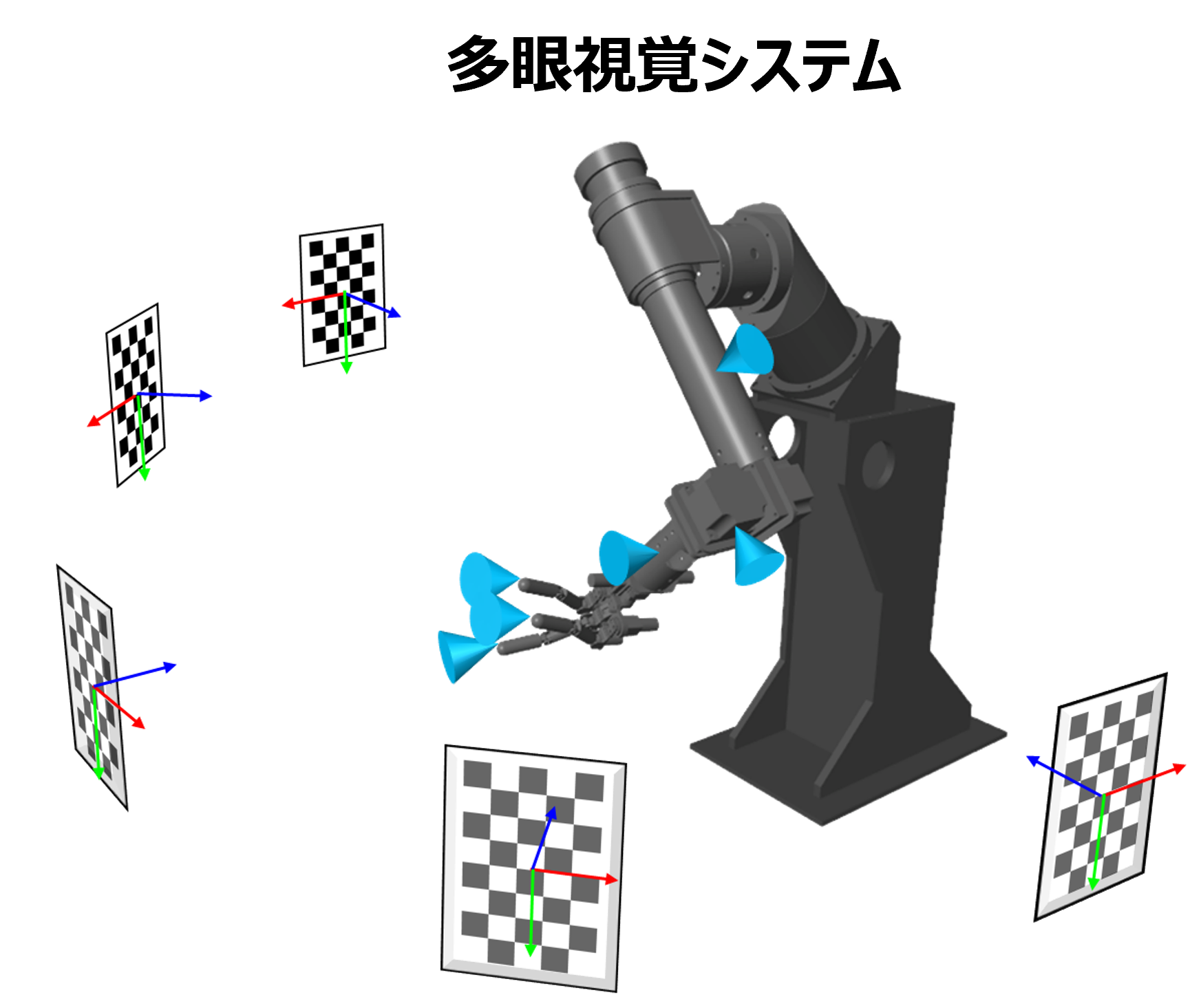
そこで本研究では,図1-1(b)に示すように,周辺環境に加えて、ロボット全身に小型カメラを多数配置する多眼ロボットシステムを提案する。本課題における学術的「問い」は,「多眼システムに適したロボットビジョンアルゴリズムとはどのようなものか」である。これは従来の、少数のカメラを前提としたロボットビジョンとは全く異なる新しい問題設定であり,新しいシステム理論が必要となる。
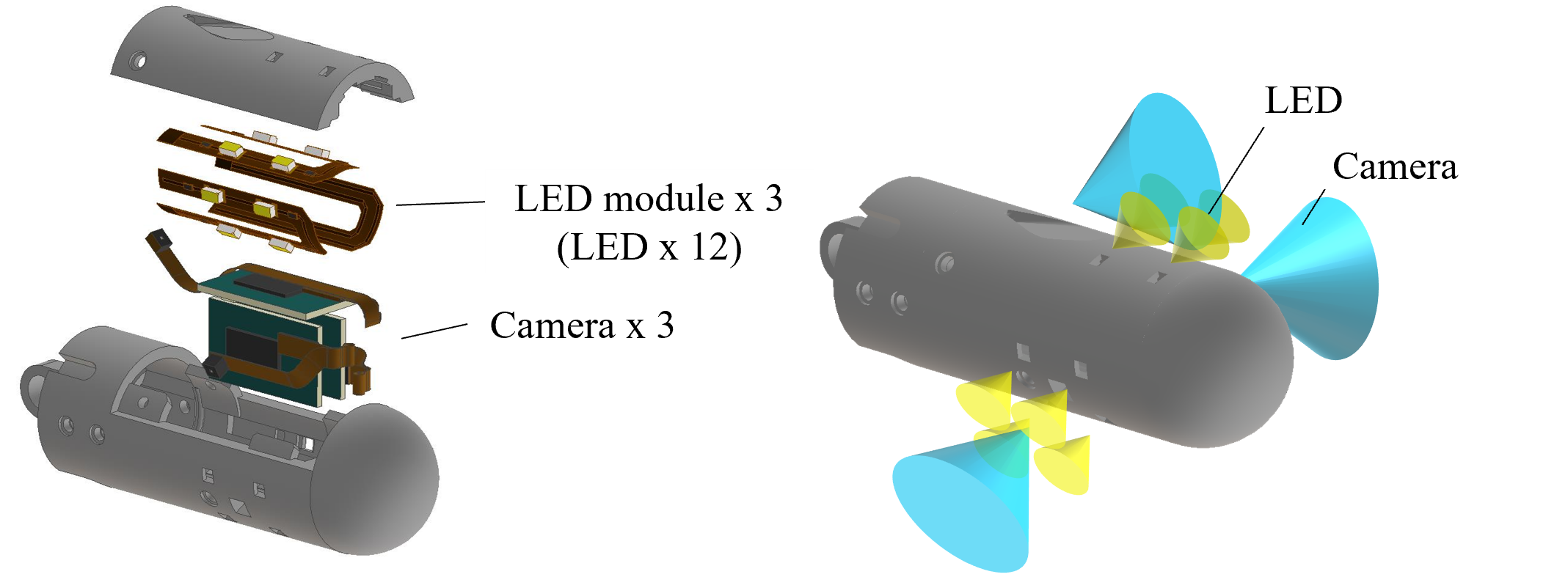
本研究の目的は,ロボット全身に小型高速カメラを高密度で配置し,カメラ間を遅延の少ないネットワークと処理ノードで接続した多眼ロボットのための,新しいロボットビジョンシステムを構築する。特に,ロボットの多眼視覚能力を最大限に活用し,リアルタイムに「無死角」に周囲の環境を認識するための3次元環境認識アルゴリズムと,それに基づく運動計画手法に焦点を当て,様々なタイプのロボットにおいて多眼システムを活用するための一般化された多眼システム開発手法を確立する。