
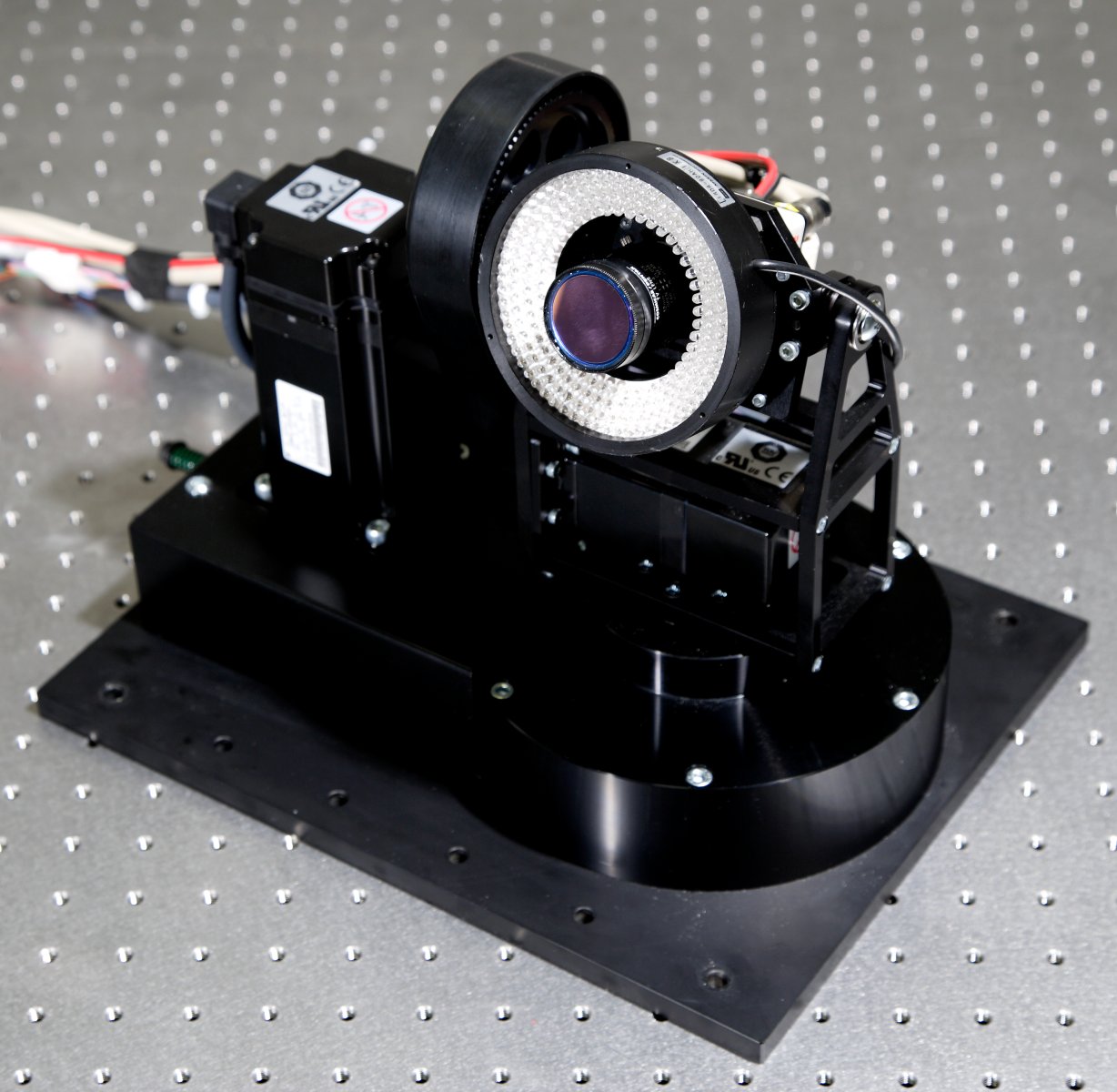
kHzレベルの高速視覚処理システムと高速視覚認識アルゴリズムの開発.人間を超える高速認識能力を実現する.
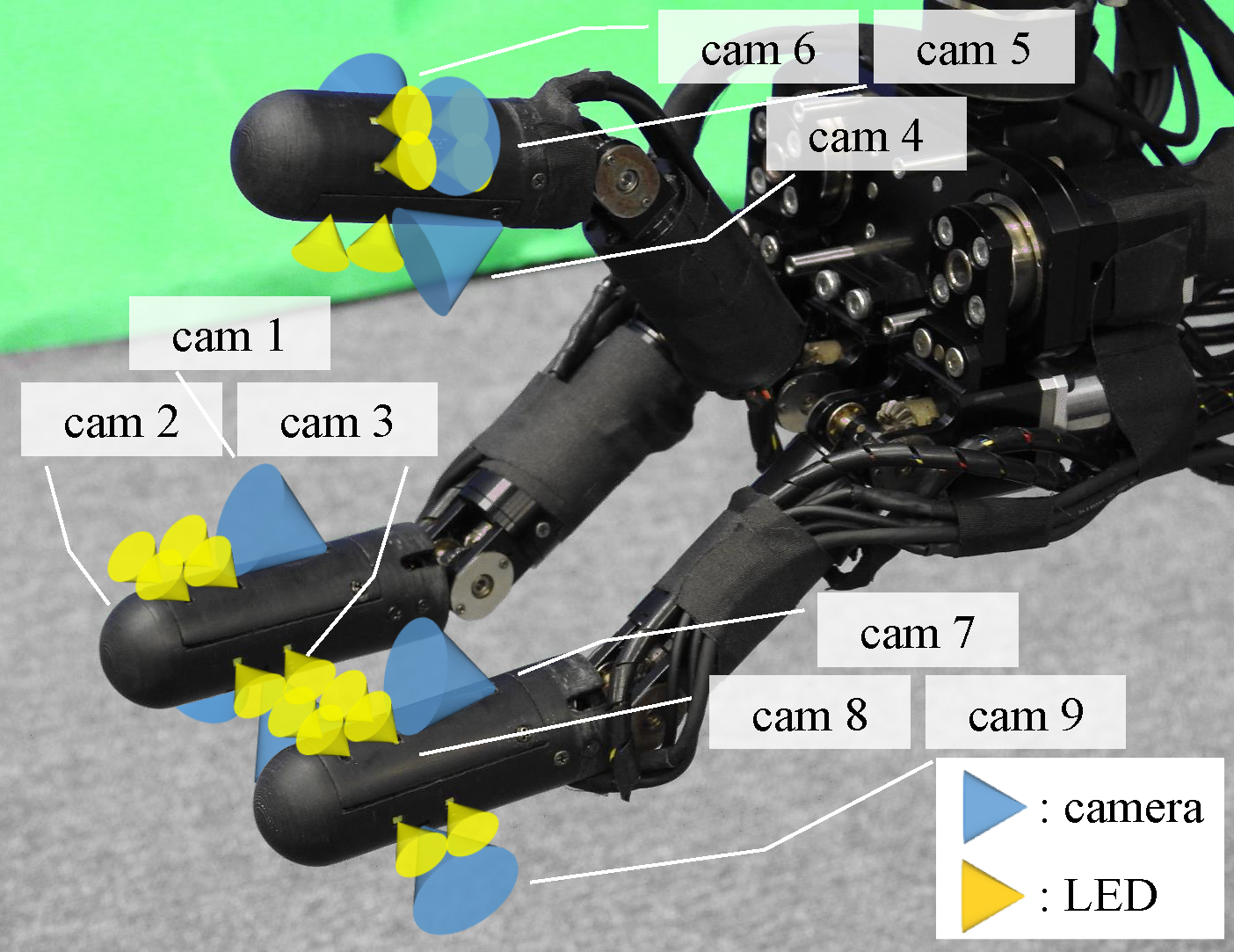
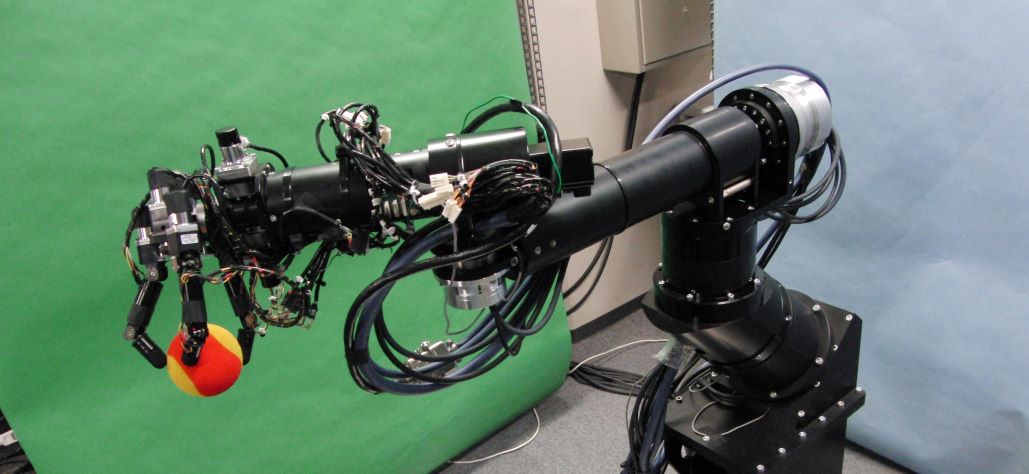
ロボットの身体表面に多数のカメラを搭載したロボットシステム.死角をなくし,周囲環境をリアルタイムで3次元認識することで,高速マニピュレーション能力の実現を目指す.

高速視覚フィードバックを利用することと,ロボットのダイナミクスを考慮した動作生成を行うことで,人間を超える高速で器用な操り能力の実現を目指す.

リアルタイムでの3次元視覚認識に基づき,布,紙,紐などの柔軟物体の器用な操り能力を目指す.

対戦相手の運動能力や心理状態を考慮し,最適動作生成を行うことで,人間に打ち勝つロボットシステムの開発を目指す.

操作制御と視覚フィードバックによるスレーブの自律制御を融合したアシスト操作システムの開発

高速視覚フィードバックによるドローンの制御
千葉大学 工学部 総合工学科 機械工学コース
千葉大学 大学院融合理工学府 基幹工学専攻 機械工学コース
住所: 〒263-8522 千葉県千葉市稲毛区弥生町1-33
教員室:自然科学総合研究棟2 6階601
Tel: 043-290-3194
実験室:自然科学総合研究棟2 6階 611
Tel: 043-290-3196
![]()
![]()