モデル予測制御を用いた飛行ロボットの動的障害物回避
研究目的
近年,人手不足や費用削減の観点から,様々なところで飛行ロボットの運用が検討されています.しかし,実際に飛行ロボットが物資の運搬や構造物点検などで運用される場合,その周囲の環境は常に変化しているので,予期していない障害物に遭遇することが考えられます.また,複数の飛行ロボットを用いた作業を行う場合,それらが衝突する可能性が少なからずあります.そのため、衝突を事前に検知,回避するような飛行ロボットの実現を目指しています.
研究概要
飛行ロボットが実際に運用されるような動的環境下では常にセンサ誤差などの不確実性が存在しています.また,不確実性は時間変化するので,飛行ロボットは不確実性を内在した障害物を検知し,計算,回避という動作を実時間で行っていく必要があります.そのため不確実性の時間変化に適した制御手法であるChance constrained MPCと当研究室の保有する数値解法を用いて,シミュレーション,実機試験を行います.
研究結果
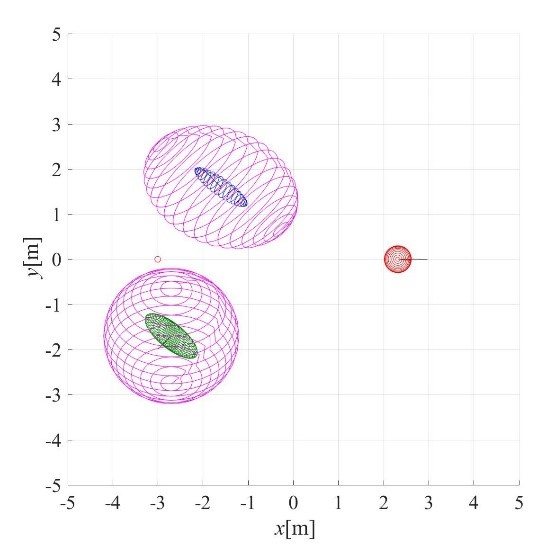
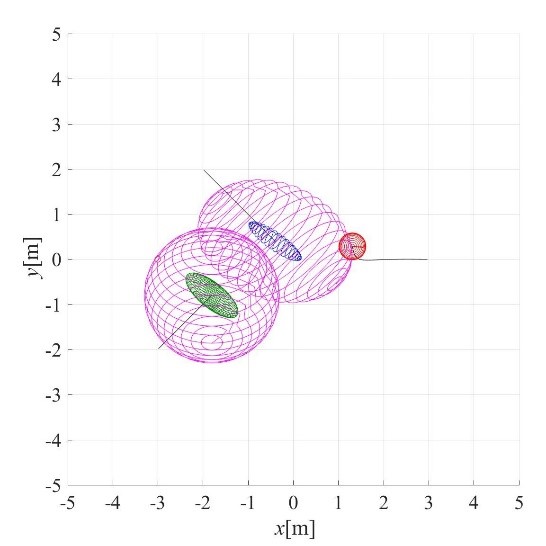
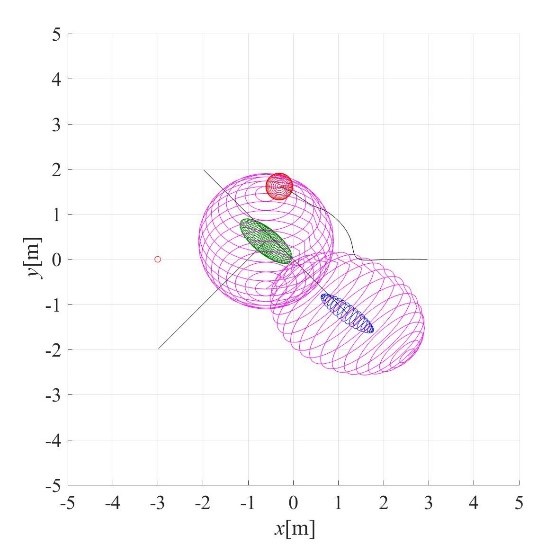
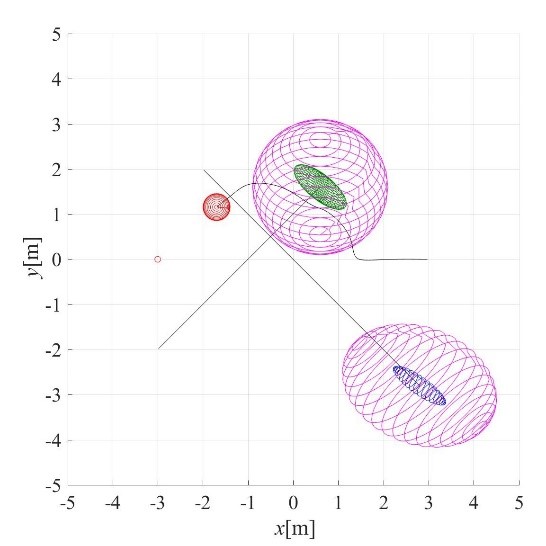
シミュレーション結果を以下に示します.機体の初期位置を (3, 0, 0) m,目標位置を (-3, 0, 0) m,初速度は (-0.5, 0, 0) m/s,楕円体障害物の初期位置をそれぞれ (-2, 2, 0) m, (-3, -2, 0) m, 速度は (0.4, -0.4, 0) m/s,(0.3, 0.3, 0) m/s, ポテンシャルフィールドは1.5 mの球体で覆うように設定したものです.赤く示された機体が,緑と青で示された障害物を回避していることが確認できます.