暗所環境におけるVisual-SLAMの性能評価に関する研究
研究目的
Visual SLAMは暗所において性能が著しく劣化する。しかし、外部の光源を用いることで暗所環境においてもVisual SLAMが安定して動作することができるのではないかと考えた。そこで、実際に点光源を用いてVisual SLAMを実行した際の結果について検証を行った。
研究概要
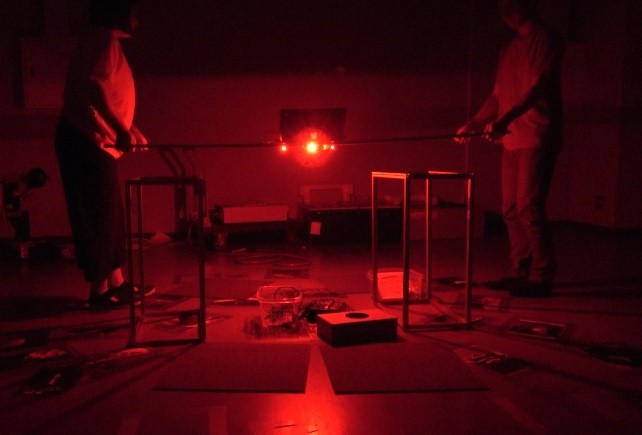
本研究では、一つの例として特徴点ベースのORB-SLAM2について、外部の点光源を用いて動作させた場合における位置推定の精度について検証を行った。モーションキャプチャを設置した暗所で点光源を点灯させながらORB-SLAM2を実行し、モーションキャプチャの計測値を真値として当該環境におけるORB-SLAM2の推定値の精度を検証した。また、オプティカルマウスの光源による性能の違いに着想を得て、光源の波長を変えた実験も行い検証を行った。
研究結果
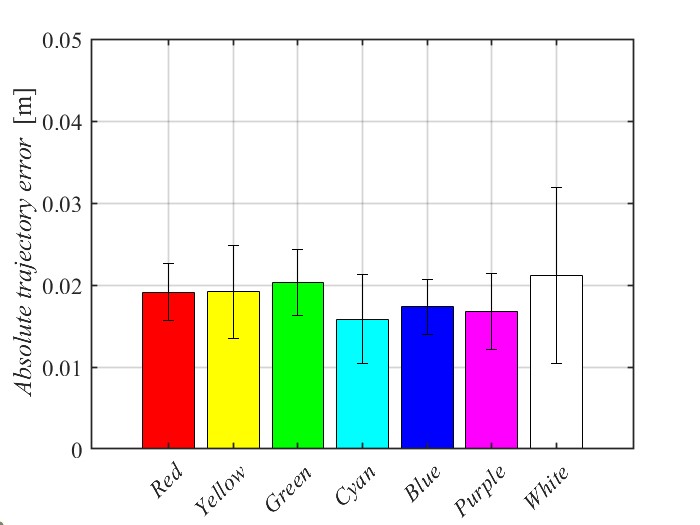
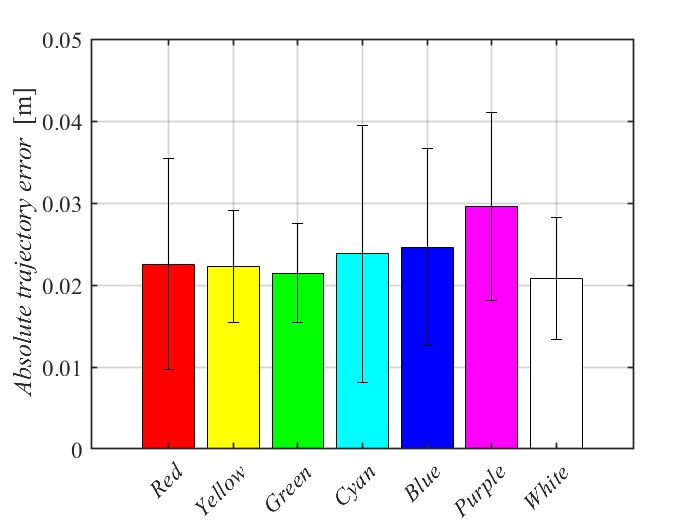
実験は単眼モノクロカメラで行った。左図は各色光源条件下でのSLAMの推定軌道の結果と真値との誤差のRMSEである。右図はカメラの自動補正を行わない状態での実験結果となる。自動補正によって画像処理が行われた場合において誤差が小さくなっていることが明らかになった。