Visual-SLAMを用いた小型無人航空機のナビゲーションシステムの開発
研究目的
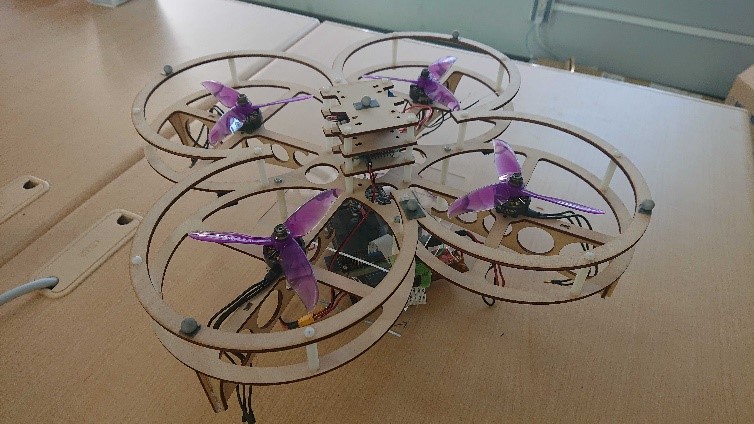
GNSSを用いた自己位置推定を行うことができない倉庫などの屋内環境において、ドローンのナビゲーションシステムを開発することを目的としている.
研究概要
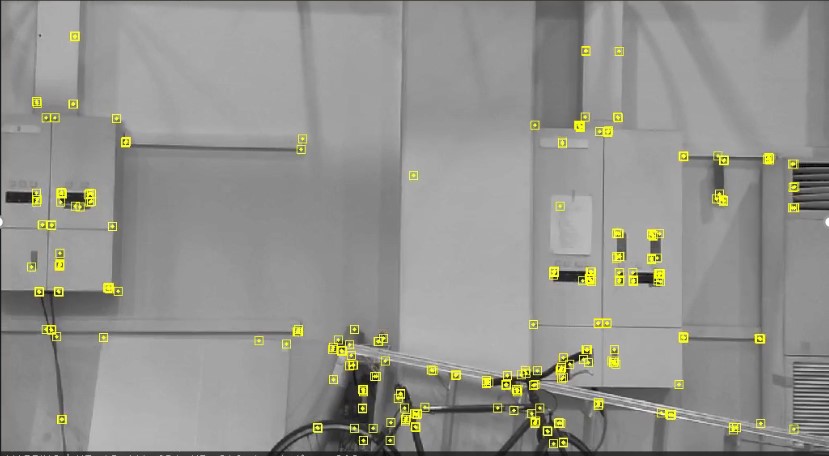
Visual-SLAMを用いて得られた機体の自己位置推定情報と、IMUより得られた機体の加速度情報を拡張カルマンフィルタによって統合することで、機体の位置、速度の推定を行う.
研究結果
Visual-SLAMによる自己位置推定情報とIMUによる加速度情報を統合することで、Visual-SLAMのスケールの推定および、機体の位置、速度の推定を行えることをオフラインで確認した.