スーパーツイスティングアルゴリズムを用いたマルチロータUAVの自律制御
研究目的
屋外環境で発生する外乱および制御対象のモデル化誤差に対して優れたロバスト性を有するマルチロータUAVの姿勢制御の実現を目的とする.
研究概要
マルチロータUAVのロバスト制御はこれまでに多種多様な制御手法が提案されているが,本研究ではスライディングモード制御と呼ばれる非線形ロバスト制御に着目する.しかしながら,スライディングモード制御では非線形の切り換え入力を用いるため,実システムに適用した際にチャタリングという発振現象が発生してしまうという問題を抱えている.以上の問題を解消するため,本研究ではスライディングモード制御の弱点を補った派生であるスーパーツイスティングスライディングモード(STSM)制御をマルチロータUAVの姿勢制御に適用し飛行性能を検証する.
研究結果
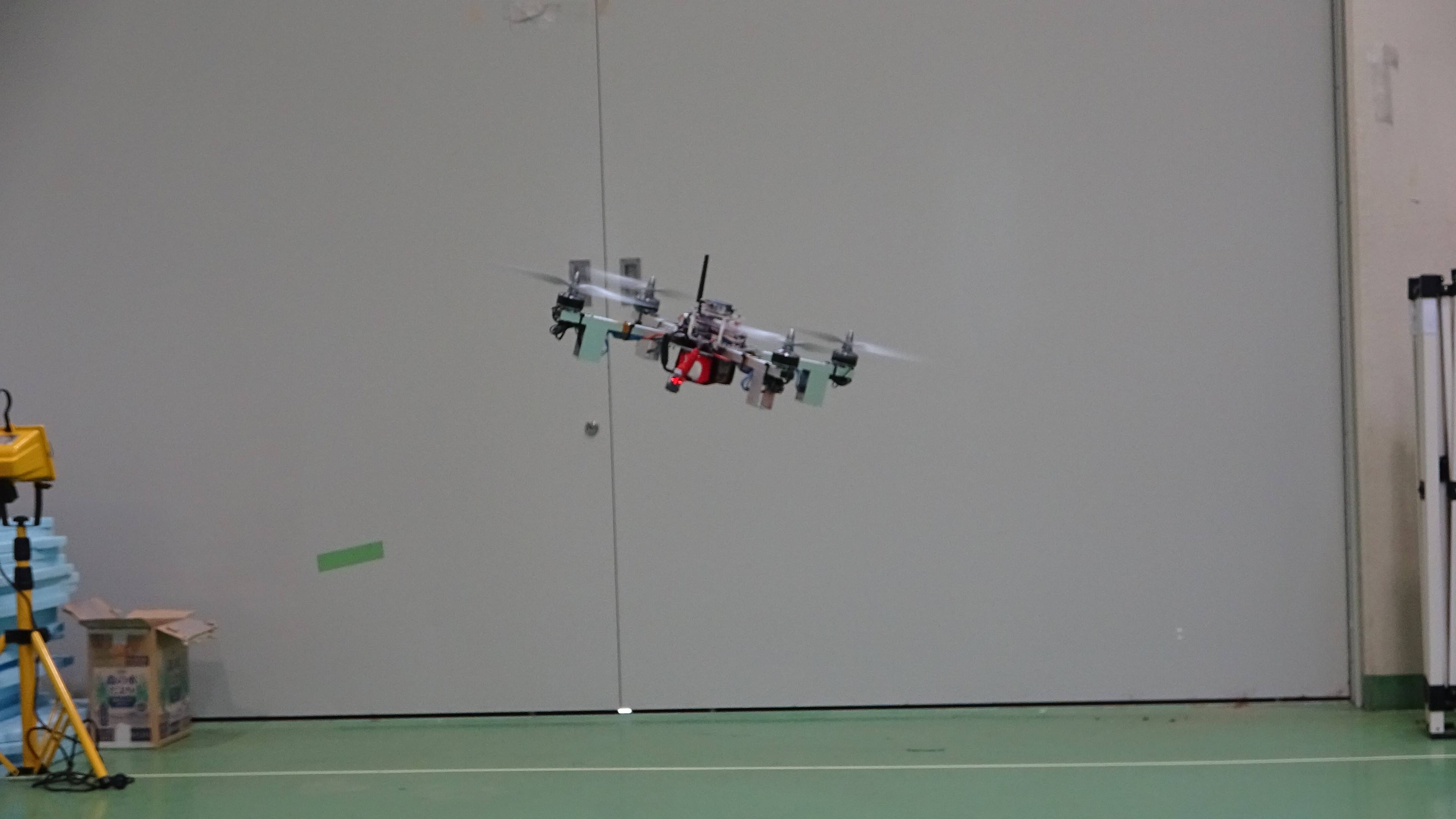
数値シミュレーションにおいて従来のスライディングモード制御よりも優れた外乱に対するロバスト性,また制御入力のチャタリングを抑えることを確認した. 実際にSTSM制御を自作機体に実装し飛行試験を行い,屋内環境においては優れた追従性能を実現した.