飛行ロボットの編隊飛行制御
背景・目的
現在世界中で飛行ロボットの利用や研究が行われているが、機体あたりのペイロードや航続時間に制限が課せられている。このような個々の飛行ロボットの能力の限界を補うため,作業効率が良く耐故障性に優れる複数機の同時運用や編隊飛行が注目され,世界中で盛んに研究が進められている. 編隊飛行を実現するためにはまず,飛行中の機体間衝突を回避する必要がある.本研究では飛行ロボットの誘導制御系にモデル予測制御を適用することで機体間の衝突回避を実現する.
研究紹介
MPCは最適制御問題を実時間で解き,フィードバックを行う制御法である.システムの状態をxとしたとき,システムのモデルに基づいて現時刻t から有限の評価区間(予測ホライズン)における状態をx*として予測し,設定した評価関数が最小になるように最適化問題を解き,制御入力を決定する.この演算を各サンプリング時刻で逐次行うことで状態フィードバック制御を実現する手法である. 評価関数には衝突を回避するための拘束条件を設定する.本研究では拘束条件として機体周囲に進入禁止エリアを設け,ロール・ピッチ方向の目標姿勢に上限を設定した.また,衝突の回避方向にルールを設定し,それぞれの拘束によりコンパクトな衝突回避を目指す.
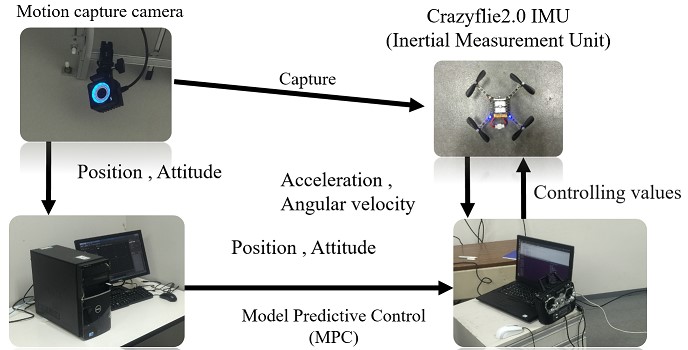
図1 実験システムのフロー図
結果
MPCを実装し2機の飛行ロボットによる衝突回避を実現した.機体がそれぞれ進入禁止エリアに進入することなく安全に衝突回避を行うことができた. (動画を載せる予定)