適応PID制御によるマルチロータヘリコプタの角速度制御
背景・目的
近年, マルチロータヘリコプタが注目を集めており, 空撮や災害調査などの分野での利用が広がってきています. しかしながら, マルチロータヘリコプタの制御調整は人の手によることがほとんどであり, 今後の商用利用の拡大に向けた量産の障害になると考えられます. そのため, 適応制御手法を用いて人の手による調整なしで自律飛行が可能となるシステムの実現を目指しています.

実験中
研究紹介
マルチロータヘリコプタの角速度制御設計に単純適応制御の一種である適応PID制御を適用させています. 適応PID制御とはPIDゲインを制御対象に応じて自動調整する制御手法です. この制御手法をシミュレーションにより有効性を確認し, 実機実験を行っています.
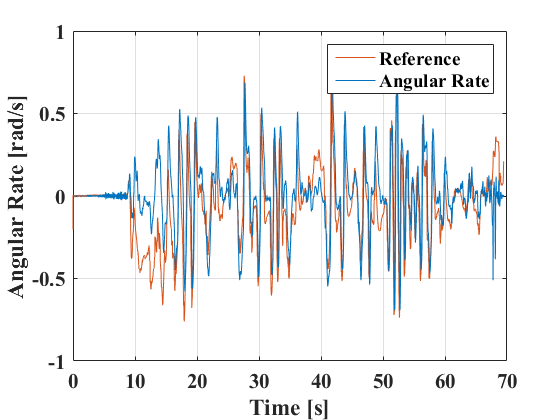
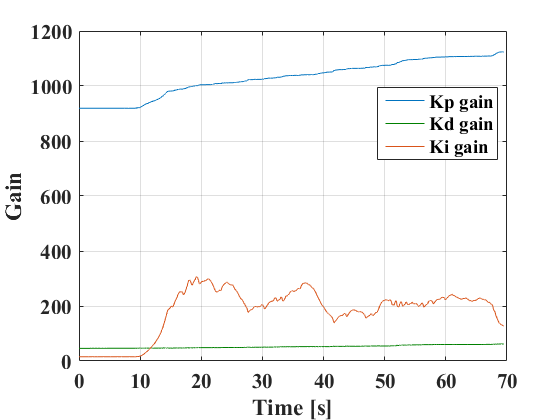
実験結果:20秒あたりから目標値に精密に追従している 実験結果:状況に応じて適正な値に変化している