深層学習を用いた周囲環境認識システムの開発
背景・目的
災害現場などで飛行ロボットを用いる際,飛行する範囲だけでなく,その周囲も危険地帯であることが多い ため,操縦者が近づくことが出来ず有視界飛行が不可能であり,純粋な遠隔操作のみでの運用は困難である ため自律飛行能力が必要となります.また,倒壊した建物の捜索などでは,屋外から屋内への移動も行う 必要があります. このようなことから,飛行ロボットが災害現場などで自律飛行する際,外乱の影響や屋外から屋内への 移動などの環境変化に対応することが必要となるため本研究では複数のセンサデータを用いることで 屋内外の周囲環境認識ができるシステムの開発を行います.
研究紹介
周囲環境認識とは,飛行ロボットが飛行している際に周囲環境が屋内か屋外か,広い空間か狭い空間かのどれに 該当するかLaser Range Finder(LRF),ステレオカメラ,Global Positioning System(GPS)などから 得られるセンサ情報を用いてリアルタイムに判断を行うものです. 周囲環境の認識を行うための手法として機械学習,特に深層学習を用います. 周囲環境認識システムの初期段階として屋内と屋外の影響の特徴が現れやすいと考えられるLRF とGPS の センサデータから多層ニューラルネットワークの学習モデルを作成し,周囲環境認識の精度の検証を行います.
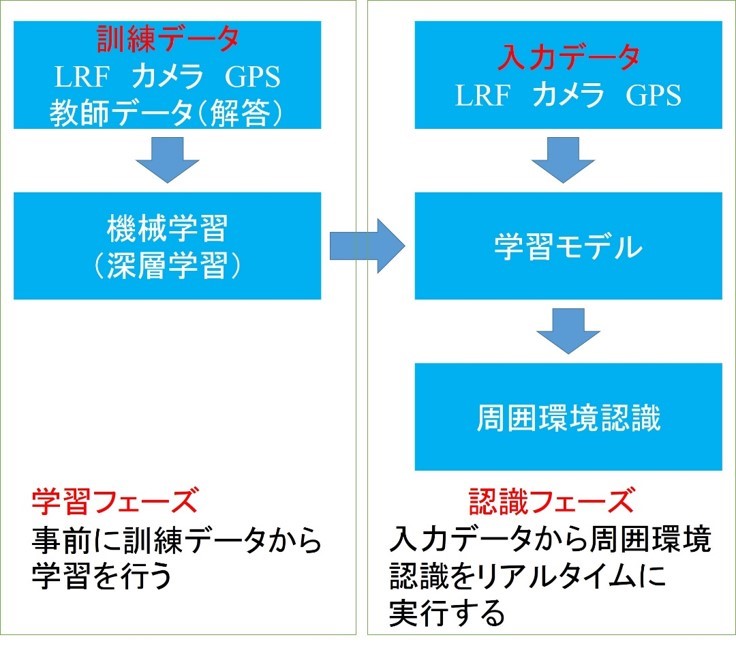
図1 周囲環境認識システムのフロー図
結果
周囲環境認識を行うために多層ニューラルネットワークによる学習モデルを作成し,モデル作成時の検証より LRF とGPS のセンサデータを利用して周囲環境認識が正解率約90 %で行えることを確認できました. 現在,リアルタイムでの認識システムをRobot Operating Systemを用いて実装し,検証を行っています.