背景・目的
危険地帯や災害救助現場などで人間が活動することは危険が伴います.そのような環境において,自律移動ロボットを用いた調査が望まれています.その中でも飛行ロボットは瓦礫等が散乱した場所でも移動が容易であり,高所から広範囲の情報を一度に収集することができるという利点があります. 飛行ロボットが災害現場などで自律飛行する際,屋内外を移動する際の環境変化に対応することが必要となります.そこで,本研究では複数のセンサデータを統合することで環境変化に対応した自己位置推定システムの開発を行っています.
研究紹介
屋内環境ではLaser Range Finder(LRF)などを用いた自己位置推定と環境地図構築を同時に行うSimultaneous localization and mapping(SLAM),屋外環境ではGlobal Positioning System(GPS)による情報を得やすいという事が知られています. そこで,それぞれのセンサから得られる情報を,カルマンフィルタを用いて統合することで目的のシステムの開発を目指しています.
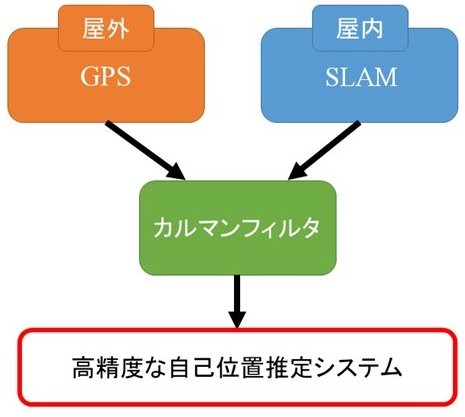
図1 システム概要
結果
飛行ロボットをLRF が優位な環境からGPSが優位な環境へ連続して飛行させて,構築したシステムの妥当性を検証しました. グラフより,複数のセンサにより得られた位置情報を統合することが出来ていることが確認できました.
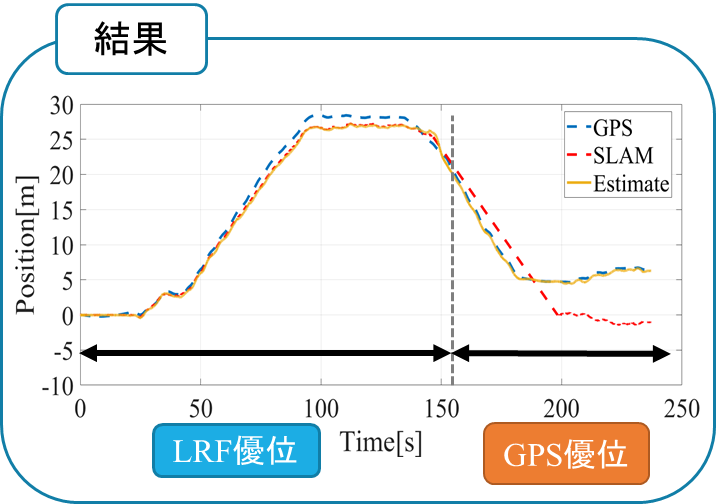
図2 実験結果