同軸2重反転式小型無人ヘリコプタの運動解析と制御
事業の目的
災害現場等の任務において、有人ヘリコプタの代替となりうる無人ヘリコプタの実現を目指す。 従来の無人ヘリコプタにはない優れた安定性とシンプルさを有する固定ピッチ同軸2重反転式ヘリコプタを提案し、その運動と制御に関する基礎的な知見を得ることを目的としている。
実施内容
同軸2重反転式小型無人ヘリコプタの運動解析と制御に関する研究
本研究では、同軸2重反転式小型無人ヘリコプタのシミュレーション環境の構築と同軸2重反転式小型無人ヘリコプタの小型モデルの製作を行った。はじめに、当該ヘリコプタの運動を精密に再現する数学モデルを導出し、導出した数学モデルを用いたシミュレーション環境を構築した。つづいて、当該ヘリコプタの運動解析の基礎データ収集と制御試験を目的とした電動式の小型モデルを製作した

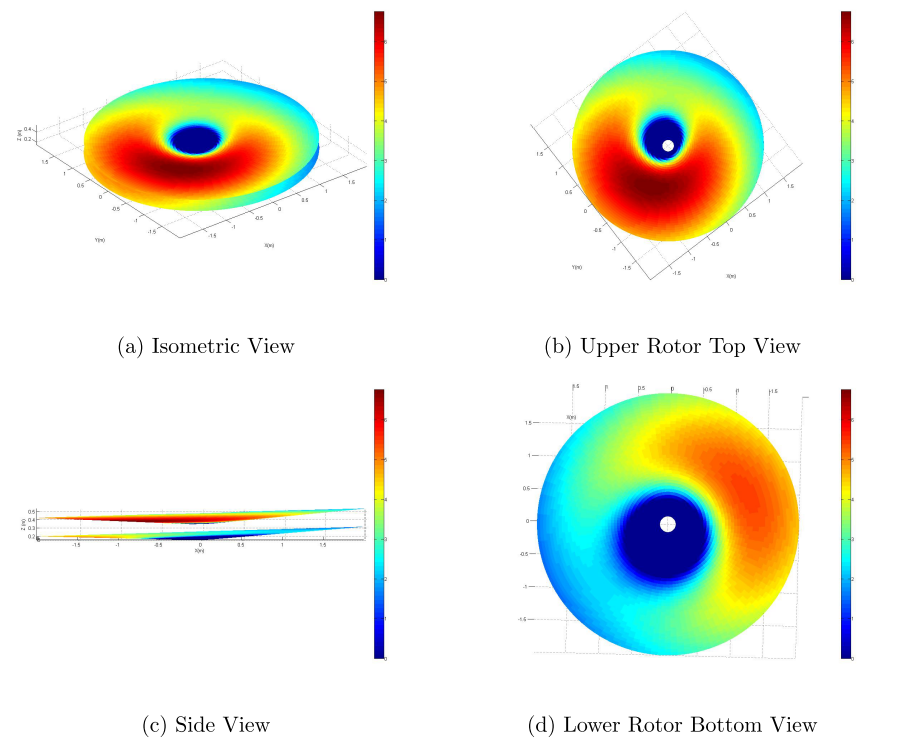
同軸二重反転ロータの空気力学解析 同軸二重反転式ヘリコプタ小型モデル
予想される事業実施効果
本事業で得られた知見を利用することで、積載重量の大きな同軸2重反転式小型無人ヘリコプタの開発を行う。この機体は現存する他の無人ヘリコプタでは実現不可能なペイロード60kgで標高3000mの高高度での飛行を目的としており、山岳レスキューや物資運搬などの新市場開拓を目指していく。
補助事業に係る成果物
(1)補助事業により作成したもの
http://www.fiber.shinshu-u.ac.jp/ars_lab/JKA/houkoku.pdf
(2)(1)以外で当事業において作成したもの
該当なし
本研究はRINGRINGプロジェクト(オートレース)の補助によって行いました