Home > 研究内容 > 高速ビジョン
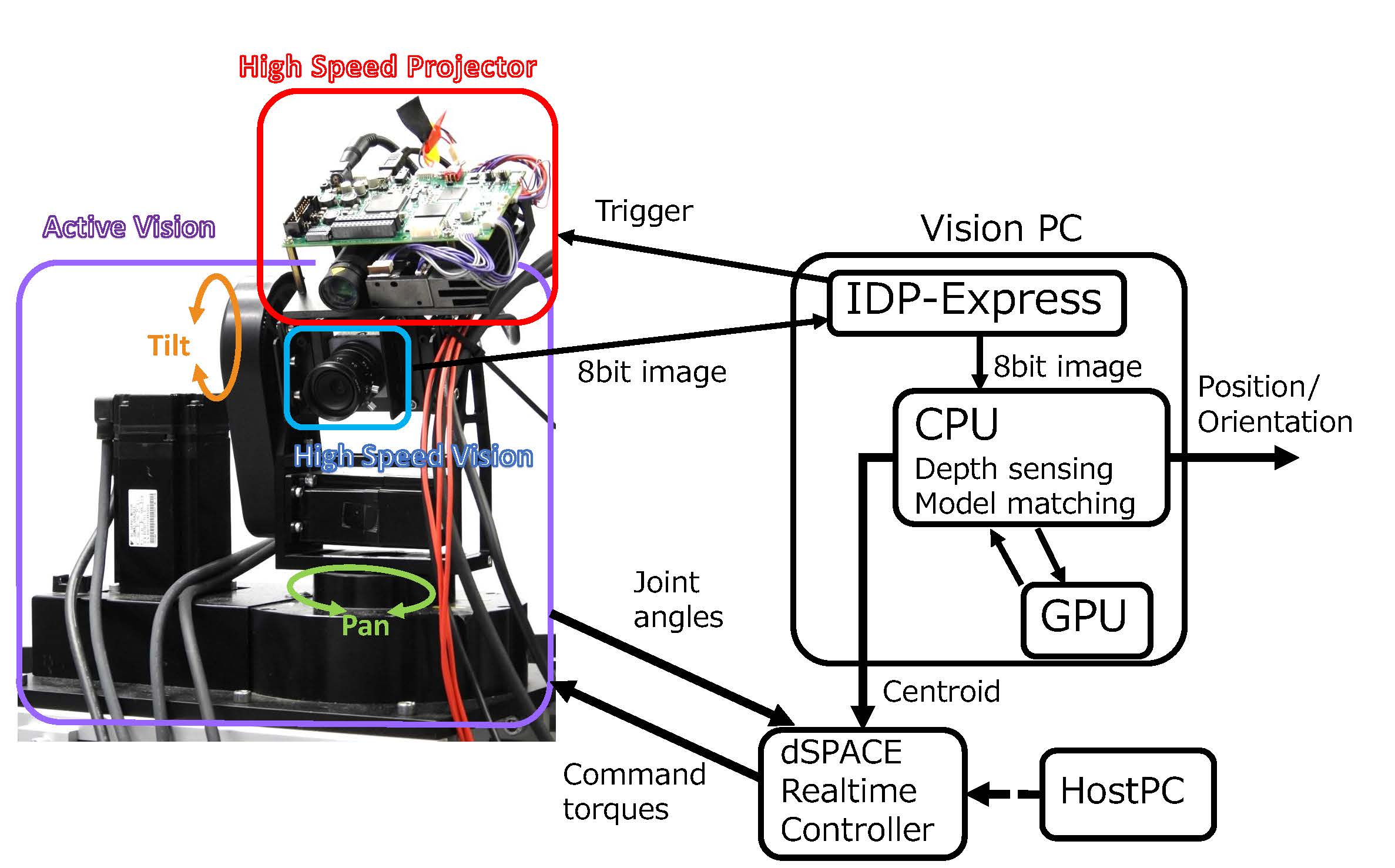
単眼カメラによる高速移動回転物体の位置姿勢追跡
The purpose of this study is to realize high-speed tracking of both the position and the orientation of the target by a monocular active vision system. We adopt PWP3D algorithm for high-speed target tracking and pose estimation. The posture trajectory of target is estimated at 400[Hz] by a monocular RGB camera, the result then feed-into a real-time control machine to actively tracking the target. The operation speed of entire system is asynchronous at 500[Hz]. Experiment result shows our method improves the performance of monocular-based target tracking in both convergence speed and robust, compared to the previous research. As a result, our system is capable of tracking object which rotates at 650[rpm] as maximum speed.- Yang Liu and Akio Namiki, Articulated Object Tracking by High-Speed Monocular RGB Camera, IEEE Sensors Journal, 2020
- Yang Liu, Pansiyu Sun, and Akio Namiki, Target Tracking of Moving and Rotating Object byHigh-Speed Monocular Active Vision, IEEE Sensors Journal, vol. 20, no. 12, pp. 6727-6744, 2020
 |
アクティブ3次元ビジョン
高速ビジョンによるトラッキング装置に高速パターン投影装置を統合したシステムを開発した. 空間パターンコード化手法を500Hzで実行するとともに,対象の追跡を行う. 結果として高速移動物体の3次元形状認識をリアルタイムで実現することが可能となった.
 |
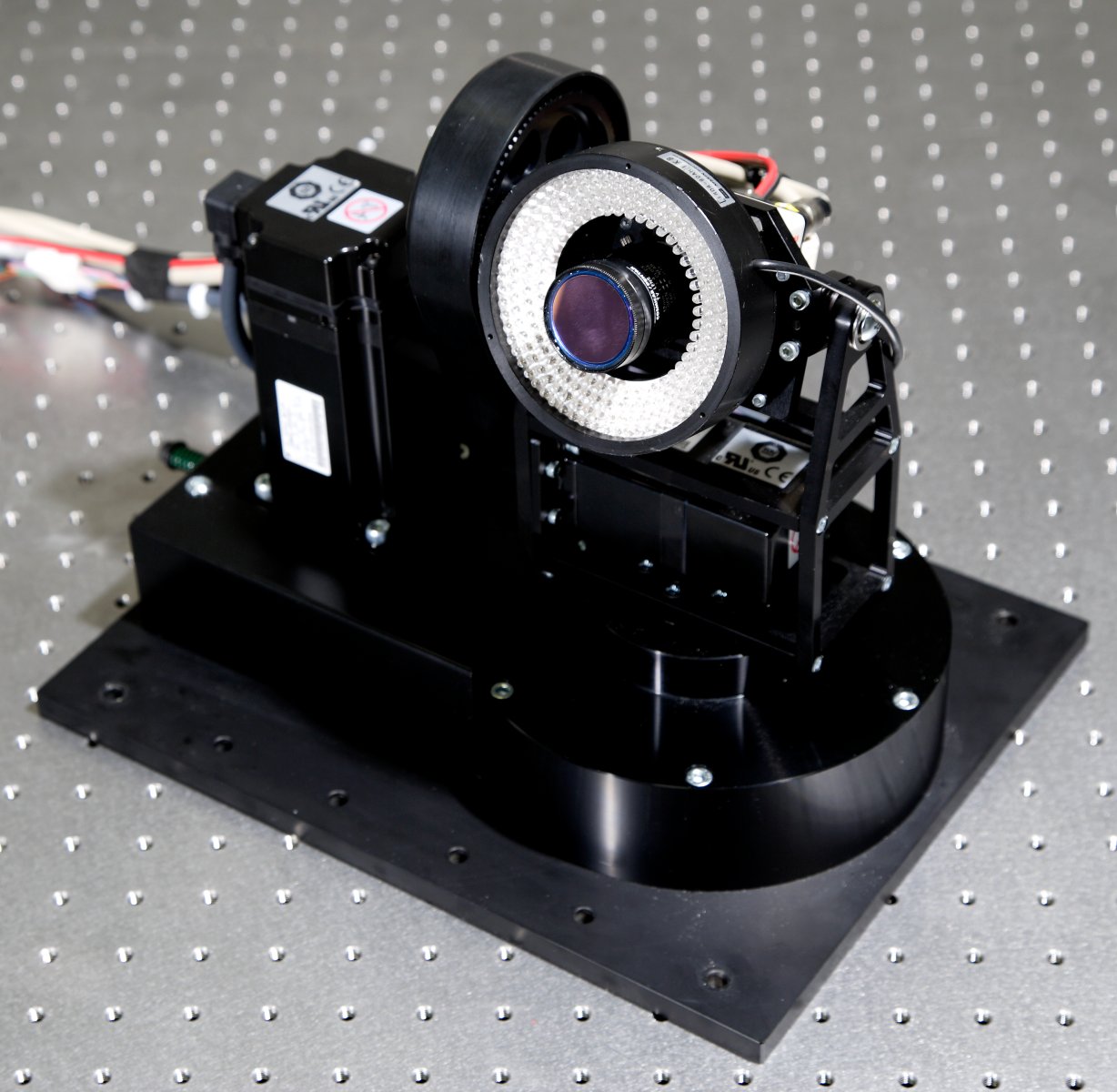
高速ビジョンシステム
高速ビジョンとは,画像センサによる画像取得から画像処理,画像認識までを高速度で行う統合システムである[1,2,3]。工業計測に用いられる記録用高速度カメラとは異なり,画像センサと画像処理装置が一体化しており,リアルタイムかつオンラインで画像処理結果を出力できる。そのため,視覚フィードバック制御に適している。 高速ビジョンを搭載した視線方向を制御するアクティブビジョンシステムを開発している。- 並木, 石川, 高速ビジョンの応用展開, 日本ロボット学会誌, Vol.32, No.9, pp.766-768, 2014
 |
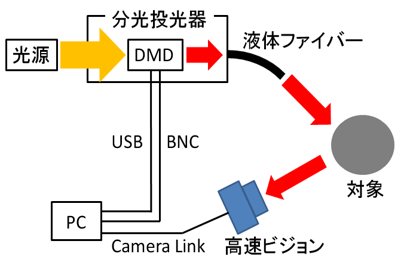
分光高速ビジョン
本研究では,高速に制御が可能な分光投光器と高速ビジョンを統合することで, 対象に応じて投光波長をアクティブに変更することで高速な分光計測を可能にする. 通常のカラーカメラでは判別が難しい対象に対しても,分光情報を用いることで高速な判別を行うことが可能となった.- 清水 貴悠,並木明夫, 分光計測が可能な高速ビジョンの開発, 日本機械学会ロボティクス・メカトロニクス講演会, 2A1-L11, 2011
 |
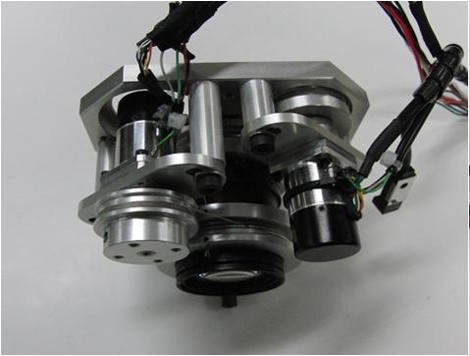
ズームとフォーカス機構を有する高速アクティブビジョンにを用いたターゲットトラッキング制御
小型ACアクチュエータを用いたズーム・フォーカスメカニズムを試作し, ズーム・フォーカスを連動させターゲットトラッキングを実現した.- 金泰演, 並木明夫, ズームとフォーカス機構を有する高速アクティブビジョンを用いたトラッキング制御, 第16回ロボティクスシンポジア講演論文集, pp.56-61, 2011
 |
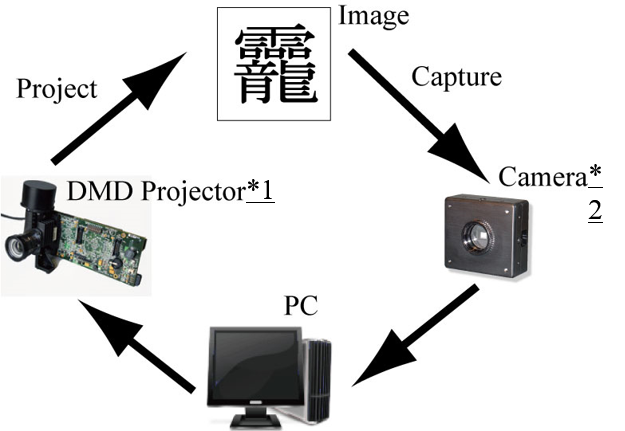
視覚サーボを用いた移動・変形するスクリーンへの投影画像制御
高速ビジョンと高速プロジェクタからなる投影画像制御システムを提案した.本システムは,”対象の3 次元特徴量が不要”,”「見え方」に基づく視覚サーボ制御”,”高速ビジョンの使用”,という3 つの特徴を持ち,投影スクリーンがリアルタイムで変化する場合でも,任意の見え方に投影制御が可能となる.また,提案手法の有用性を検証するために実験を行い,移動,変形するスクリーン上の画像の制御が有効に行われていることを示した.- 村上健一,並木明夫, 視覚サーボを用いた移動・変形するスクリーンへの投影画像制御, 日本機械学会論文集C編, 査読有, Vol.79, No.808, pp.232-244, 2013
 |
