Home > 研究内容 > マスタ・スレーブロボット
遠隔操作用マスタシステムの開発
旭光電機株式会社との共同研究として,Flexible Sensor Tube(FST)を用いた遠隔操作用のマスタシステムを開発した. FSTは長さ50[mm]のリンクと関節で構成されたセンサであり,各関節には曲げ角度を検出する角度センサ(ポテンショメータ)が内蔵されており,任意の三次元位置・形状を計測することができる.開発システムでは,両手先の位置姿勢,指の曲げ角度,首の向きを計測し,UDPを用いて10[ms]ごとに脚ロボットのコントローラに送る.コントローラでは,逆運動学に基づいてロボットの関節角度に変換すると同時に操作者のためのアシスト制御の補正を加える.また,スレーブとなる脚ロボットのステレオカメラから得られる視覚情報がHMDを通して操作者に提示される.- 並木明夫, 高明遠, 松下左京, 伊藤直樹, 田中徹, 上田明寿, 村上慶典, 池田真也, 和田貴志, 舘 暲, Telexistence FSTによる高出力双腕ロボットの遠隔操作システムの開発, 日本機械学会ロボティクス・メカトロニクス講演会, 2P1-P04, 2012
| > | > |
操作ロボットへのアシスト制御
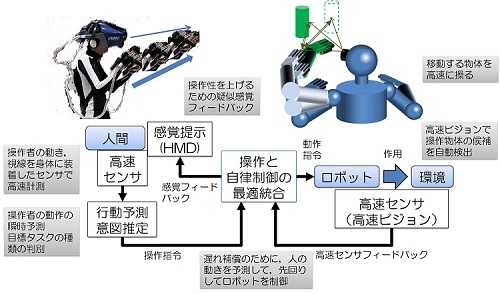
近年,危険作業用において,人間が直接操作するマスタ・スレーブロボットの必要性が高まっている。通常のマスタ・スレーブでは通信と動作の遅れのために,作業速度の高速化は困難であったが,これに対して操作者の動きを予測するとともに,スレーブ側で操作制御と高速視覚フィードバック制御を統合することで作業の高速化を実現している.図はボールキャッチングを行っている例であり,通常では遅れのためにこのような高速動作は難しいが,動作予測と視覚フィードバック制御によりスムーズなキャッチングが実現できている。これは高速ビジョンにより人間よりも高速に環境認識することで,人間の動作を先回りしてアシストしているためである。- A. Namiki, Y. Matsumoto, Y. Liu, T. Maruyama, Vision-Based Predictive Assist Control on Master-Slave Systems, IEEE Int. Conf. on Robotics and Automation, pp.5357-5362, 2017
 |
> |
災害救助ロボットの遠隔操作
革新的研究開発推進プログラム(ImPACT)「タフ・ロボティクス・チャレンジ(TRC)」(プログラム・マネージャ:田所諭) にて,災害対応を目的とした脚ロボットのマニピュレーション用遠隔操作システムを開発した. 検証実験によって,ドリルの操作,バルブの開閉作業を行った.- Kenji Hashimoto, Takashi Matsuzawa, Xiao Sun, Tomofumi Fujiwara, Xixun Wang, Yasuaki Konishi, Noritaka Sato, Takahiro Endo, Fumitoshi Matsuno, Naoyuki Kubota, Yuichiro Toda, Naoyuki Takesue, Kazuyoshi Wada, Tetsuya Mouri, Haruhisa Kawasaki, Akio Namiki, Yang Liu, Atsuo Takanishi, Satoshi Tadokoro, WAREC-1?A Four-Limbed Robot with Advanced Locomotion and Manipulation, Disaster Robotics: Results from the ImPACT Tough Robotics Challenge, pp.327-397, Springer, 2019
| > |
