Home > 研究内容 > 高速ロボット
多眼視覚ハンド
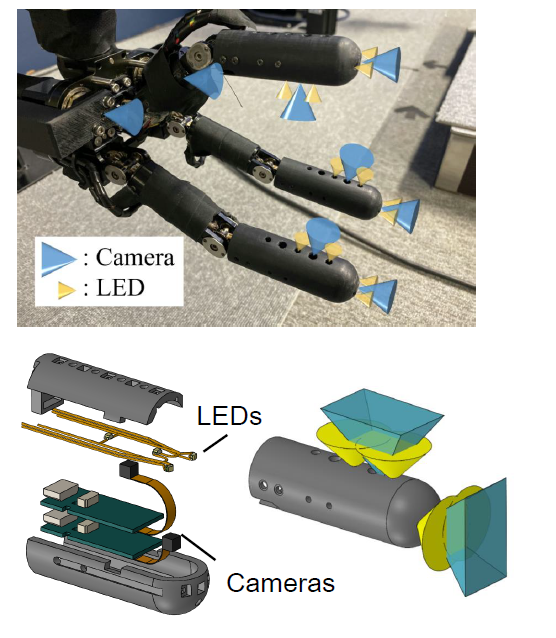
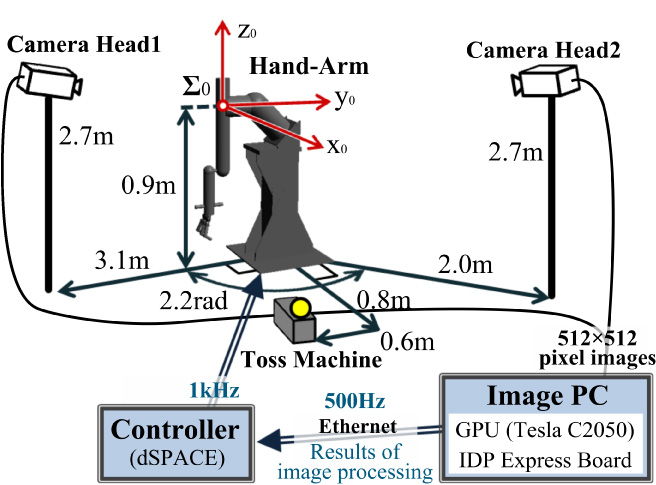
近年,視覚センサの小型化,低価格化により多数のカメラの実 装が容易となり,GPU などの並列計算機の普及により実時間で の視覚情報の処理が可能となってきている.本研究では,多 数のカメラをロボットハンド上に配置して外部の固定高速ビジョ ンからの視覚情報と統合することで,視野角を広げて死角をなく した高速・高精度でのマニピュレーションを実現した. ボールキャッチングに適用し,多眼視覚による視覚サーボによりキャッチ位置のリアルタイム補正を行い 成功率を向上させた..多眼視覚ハンドで計測したボール推定位置を多眼視覚ハンドに投影した,画像上での位置に到達させるように視覚サーボ制御を行うことで成功率を向上させる.- Masaki Sato, Akira Takahasi, and Akio Namiki, High-Speed Catching by Multi-Vision Robot Hand, 2020 IEEE/RSJ Int. Conf. on Intelligent Robots and Systems, 2020
- 佐藤将貴、高橋 晃、並木 明夫, 多眼高速ビジョンを備えたロボットハンドによる高速キャッチング, 日本機械学会ロボティクス・メカトロニクス講演会2020(ROBOMECH2020), 2020
- 佐藤将貴、高橋 晃、並木 明夫, 多眼高速視覚を備えたロボットハンドによる視覚フィードバック制御, SI2019(第20回計測自動制御学会システムインテグレーション部門講演会), 2C4-13, 2019
 |
双腕多指ハンドアームによる3ボールジャグリング
ステレオ高速ビジョンと2台の高速ハンドアームを用いてボールジャグリングの研究を行った. (1)効率的な投げ上げ軌道生成,(2)高速視覚フィードバックによる高精度キャッチング,により,3つのボールを両手でジャグリングすることに成功した.- 高橋 晃,甲村 直大,並木 明夫, 高速双腕ジャグリングロボットにおける最適軌道生成, 第37回日本ロボット学会学術講演会予稿集, 1H1-06, 2019
多指ハンドアームによる片手ボールジャグリング
ステレオ高速ビジョンと高速ハンドアームを用いてボールジャグリングの研究を行った.多指ハンドを用いることで高度な操作が実現できる一方で,自由度が多くなるために制御は難しくなる.ここでは,(1)運動連鎖に基づく効率的な投げ上げ,(2)高速視覚フィードバックによる高精度キャッチング,により,2つのボールを片手でジャグリングすることに成功した.このようなハンドアームでのジャグリングの例は世界初である.- 木崎, 並木,脇屋,石川,野波, 高速多指ハンドアームと高速ビジョンを用いたボールジャグリングシステム, 日本ロボット学会誌, Vol.30, No.9,pp.102-109, 2012
- Takahiro Kizaki and Akio Namiki, Two Ball Juggling with High-Speed Hand-Arm and High-Speed Vision System, 2012 IEEE Int. Conf. on Robotics and Automation, pp.1372-1377, 2012
- 岡朋暉,並木明夫, 多指ハンドアームによる動力学を考慮したジャグリングの軌道生成, 計測自動制御学会論文集, Vol.54, No.1, pp.46-54, 2018
 |
多指ハンドアームによるけん玉
人間と同様,けんをロボットハンドに握らせた状態での玉のキャッチを実現している.剣の持ち方が試行毎に異なるが,高速ビジョンと触覚センサの双方によって把持したけんの位置計測を行うことで,安定した操作を実現している).視覚と触覚はどちらも1msのレートであり,情報統合が滑らかかつ信頼性の高いものとなっている.- A. Namiki and N. Ito, Ball Catching in Kendama Game by Estimating Grasp Conditions Based on a High-Speed Vision System and Tactile Sensors, Int. Conf. Humanoid Robots, pp.634-639, 2014
 |
